
后期预处理过程中,局部归一化可以校正图像中由光学系统或环境因素造成的非均匀光照或阴影伪影,使整幅图像的背景和光照变得均匀一致,这通常通过LocalNormalization(LN)或NormalizeScaleGradient(NSG)进行实现。
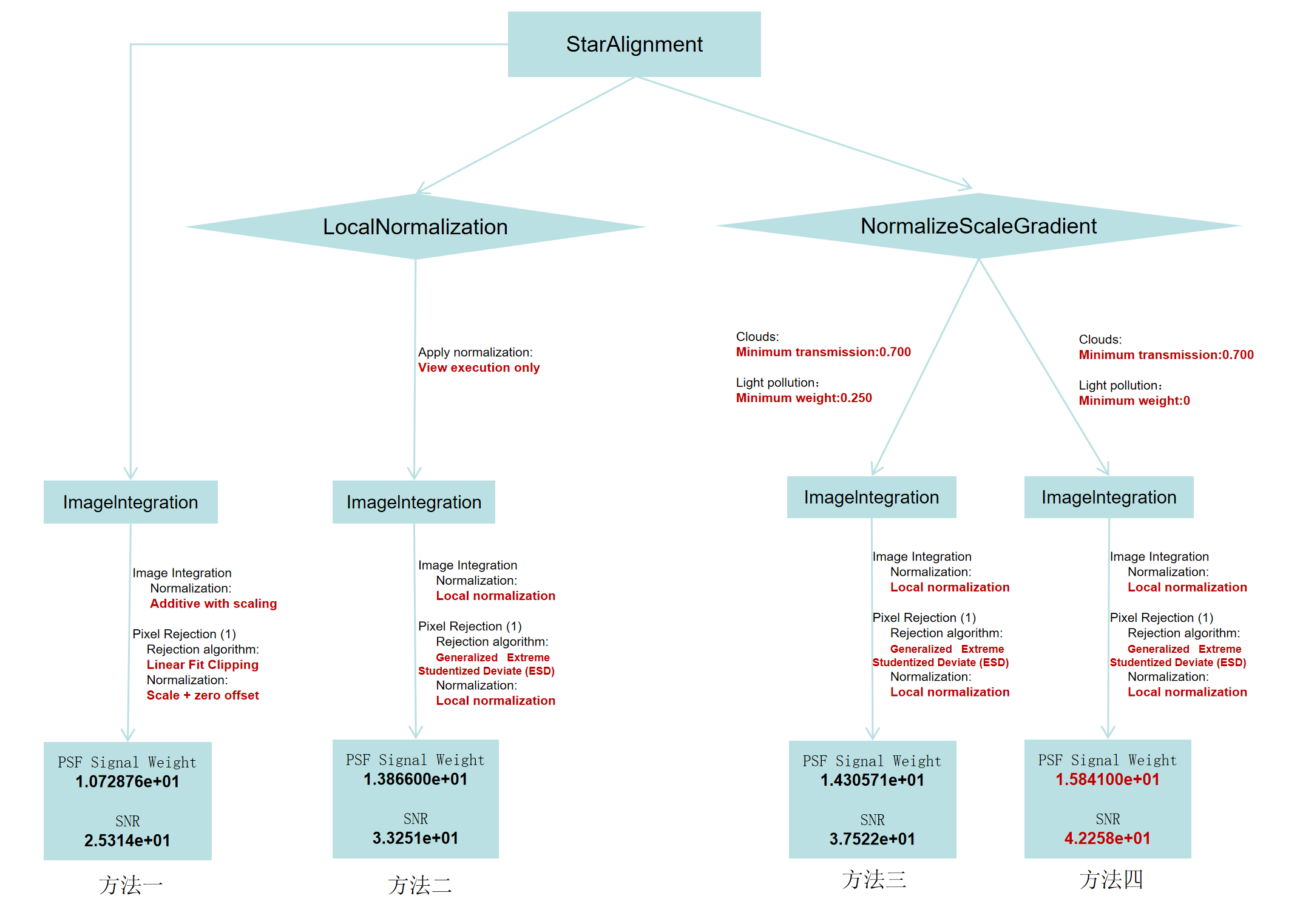
这里通过对4种预处理方法结果的比对(图1),来比较它们之间的效果差异。方法1为最经典的后期流程,即StarAlignment后接Imagelntegration,采用Additive with scaling进行归一;方法2是最传统的LN流程,即StarAlignment后接LocalNormalization,应用方式为View execution only,然后通过再进行Imagelntegration,并采用Generalized Extreme Studentized Deviate (ESD)进行归一;方法3是NSG流程,StarAlignment后接NSG,但是去除了权重较低的图片,再进行Imagelntegration,采用ESD进行归一;方法4也是NSG流程,StarAlignment后接NSG,但是保留了所有有月和无月的图片,再进行Imagelntegration,采用ESD进行归一。其中方法3的Light pollution为Minimum weight:0.250,方法4是Light pollution为Minimum weight:0。这使得方法3相较于方法4剔除了167张低权重图片,这些图片基本都是大月亮环境所拍摄(图2)。
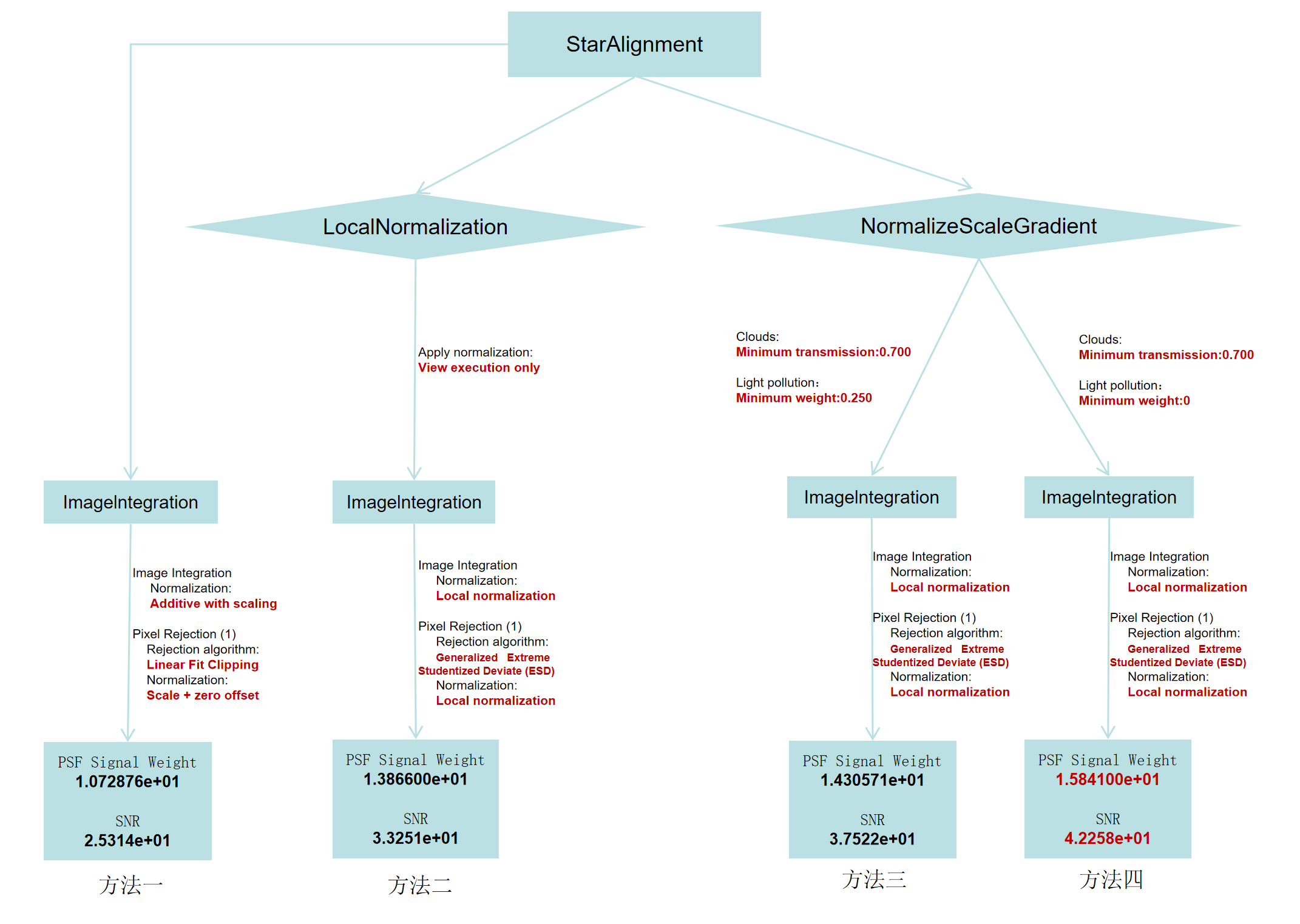
图1:4种预处理方法
- 比对的结果可知,NSG流程在Signal Weight(PSF)及SNR的得分上都明显领先其他算法。虽然NSG默认Light pollution的权重0.250以下的照片被剔除(在本测试原数据中这部分为大月亮下拍摄的低信噪比照片),但是这部分照片如被合理赋予权重及利用(方法4),其实仍可提高最终信噪比。图3展示了H通道在满月和无月环境下所摄照片的信噪比对比,之所以选择H通道(3mm),是因为它是理论上抗月光光害最强的通道,但是结果显而易见,这部分照片的质量仅仅为无月状态的30-40%。当然这种月光影响程度比较非常不严谨,因为它收到目标天体与白道面的距离、光污染程度、滤镜品牌、焦比等等大量因素干扰,这里只是阐述本测试所使用数据源的情况。此外,通过对4种方法处理结果的肉眼主观对比分析,局部归一化流程处理后的数据,在全局均一度上有显著改善。这在本测试的数据中表现为图片左上区暗星云被明显拉升,右下区星云的对比度也得到改善(图4)。在星云信噪比本身较高、画面较平坦的区域,肉眼细节对比细节差异可能没有四边区域明显(图5),但是这种信噪比提升在SubframeSelector的数据分析上仍是客观存在的。
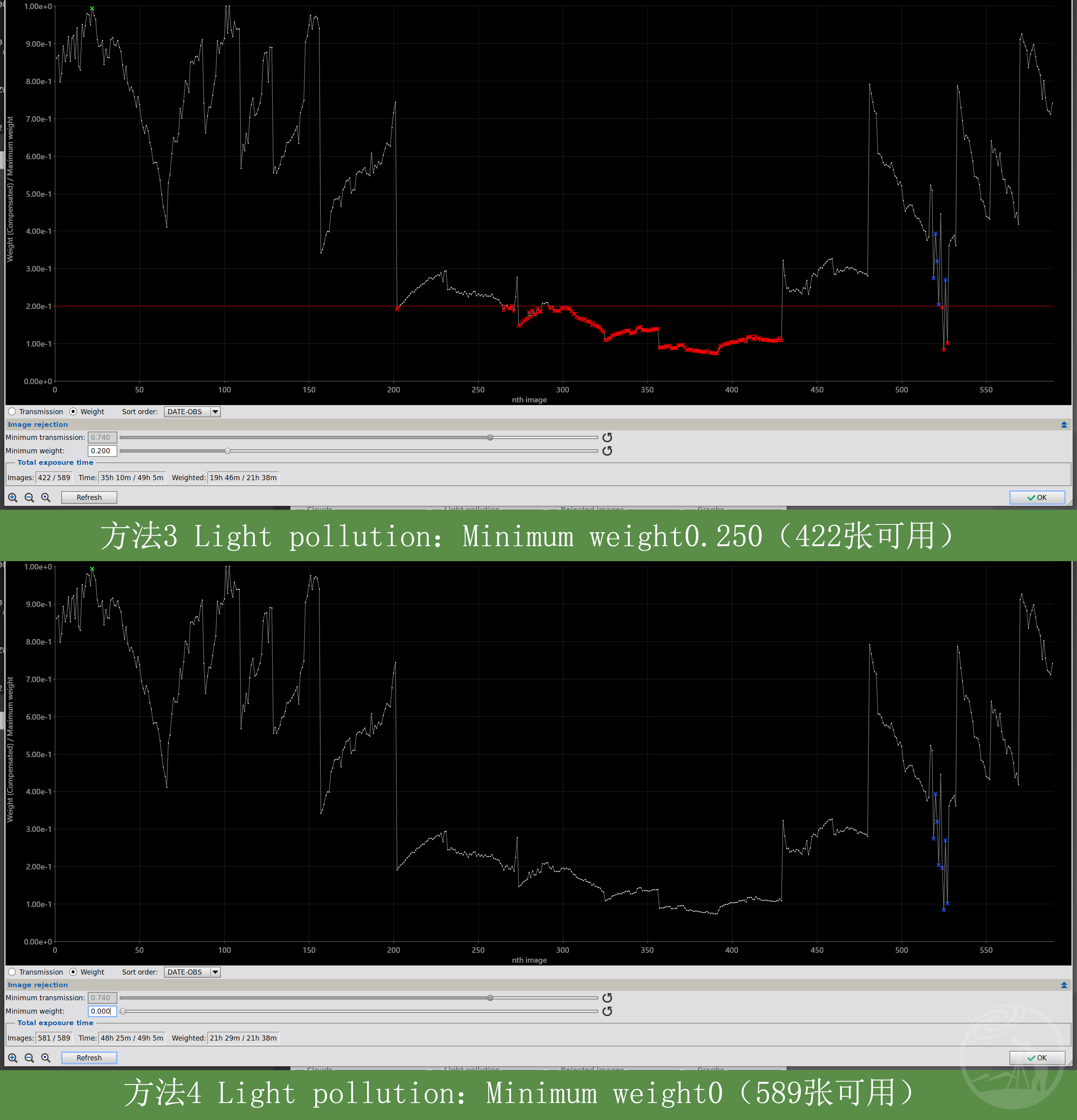
图2:方法3和方法4设置参数差异。方法3相较于方法4剔除了167张低权重图片
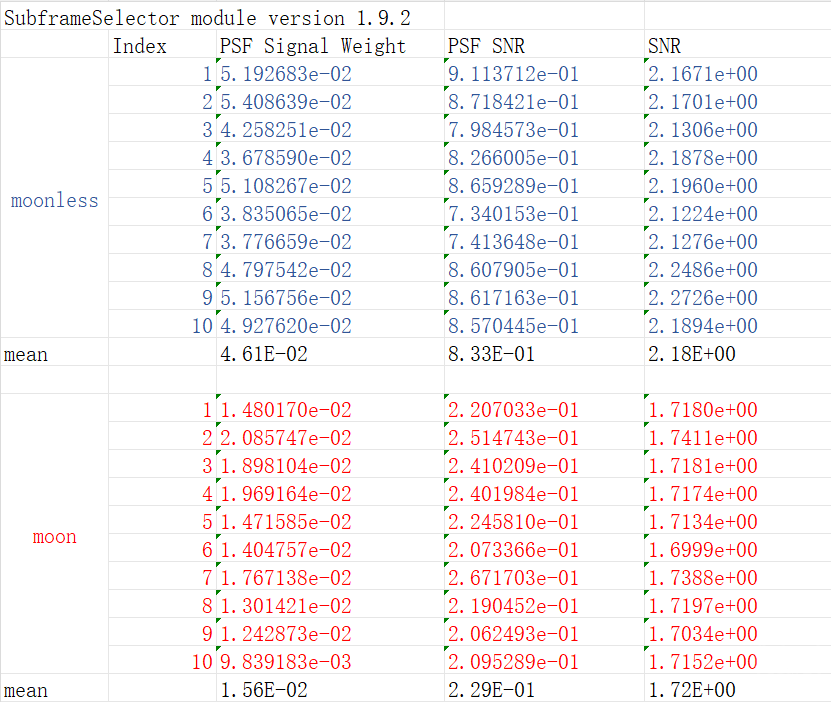
图3:H通道在满月和无月环境下所摄照片的信噪比对比
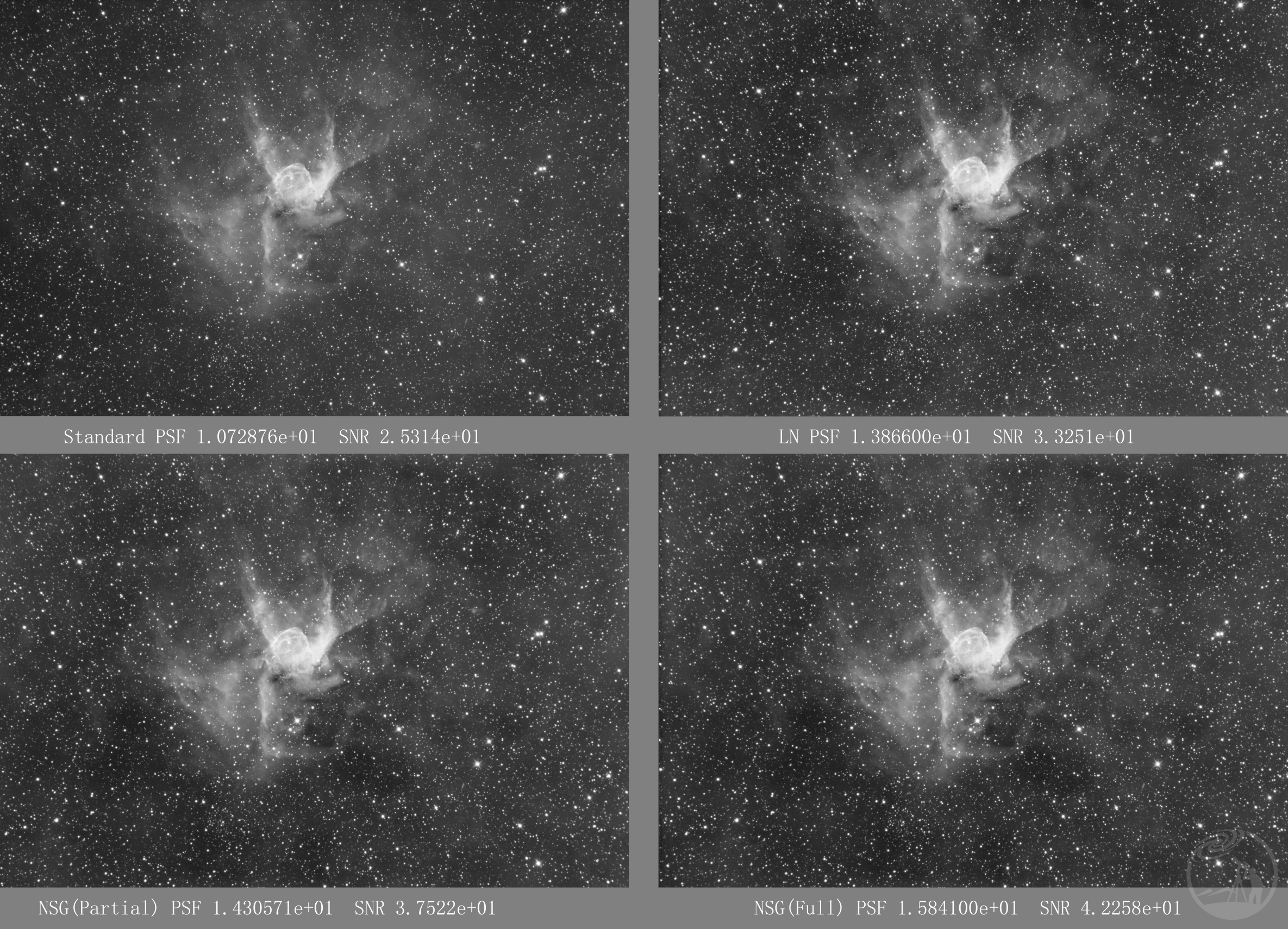
图.4:4种方法的结果全局对比图。方法1(左上)、方法2(右上)、方法3(左下)、方法4(右下)
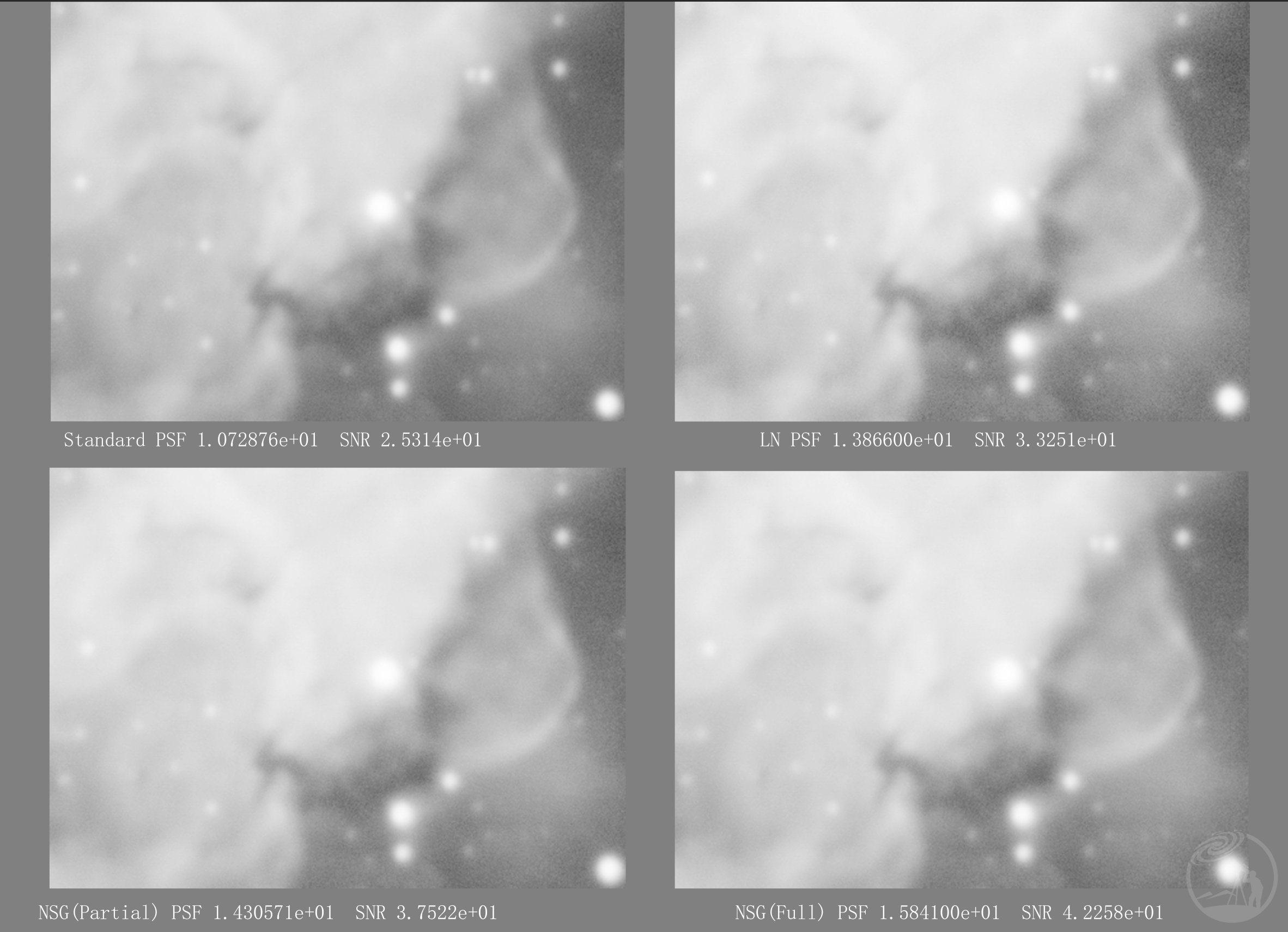
图5:4种方法的结果中心局部对比图。方法1(左上)、方法2(右上)、方法3(左下)、方法4(右下)
星友评论