

Analyzing PHD2 Guiding Results – A Basic Tutorial
PHD2导星结果分析--基本教程
原作者:Bruce Waddington bw_msg01@earthlink.net
翻译:粥当当
Introduction 引言
At some point, most imagers want to analyze the guiding performance they’re getting. They may be trying to identify and fix particular problems or perhaps just trying to get the best performance they can from their set-up. Either way, the PHD2 guide logs are the best source of data, and using them is far better than trying to look at the guiding graph in real-time. The latter is useful as a quick check on how things are going, but any serious problem diagnosis or tuning requires a longer time window than what is available in the real-time graph. In this document, I’ll be using Andy Galasso’s PHDLogViewer application as a way to show common problems and guiding behaviors. This is the tool we most often use for helping PHD2 users, and it is likely to serve you well.
在某种程度上,大多数拍摄者都想分析他们获得的导星性能。可能是为了找出并解决特定的问题,或者只是试图得到最佳导星结果。无论哪种情况,PHD2导星日志都是最好的数据来源,使用它们比实时查看导星图表要好得多。 后者对于快速检查情况非常有用,但任何严重的问题诊断或调优都需要一个比实时图表更长的时间窗口。 在本文中,我将使用Andy Galasso的PHDLogViewer程序作为展示常见问题和导星行为的方法。 这是我们最常用来帮助PHD2用户的工具,它可能也会很好地为你服务。
What I’ll discuss in this document is simply the result of my own personal experience and research. I don’t claim to be an expert on telescope mount mechanics, and I still encounter guiding behavior that I can’t explain. But I’ve been using some version of PHD since 2006, and I’ve analyzed hundreds of guide logs in the ensuing years, both my own and those from other PHD2 users. Hopefully, what I’ve learned can help you understand your guiding results or can at least accelerate your learning curve a bit.
本文中所讨论的只是我个人的经验和研究结果。我并不敢自称望远镜赤道仪力学方面的专家,我仍然也会遇到无法解释的导星行为。但我从2006年开始就开始使用某种版本的PHD,在接下来的几年里,我分析了数百个导星日志,包括我自己的和其他PHD2用户的。希望我所学到的能帮助你理解你的导星结果,至少能加速你的学习速度。
Basics – A Big Picture View 基础知识–全局概览
Summary Statistics 统计摘要
When looking at these graphs and statistics, you want to look at the measurements in units of arc-secs (a-s). If this isn’t obvious to you, take a look at “Image Scale and Measurements in Arc-secs” in the Appendix. To get a big picture view of your guiding, start by looking at the RMS numbers that appear to the lower right of the graph:
在查看这些图表和统计数据时,你需要查看以角秒(a-s)为单位的测量值。如果你对此方面不够了解,请查看附录中的“以角秒为单位的图像比例和测量”。要全面了解你的导星,首先查看图表右下角显示的RMS数字:
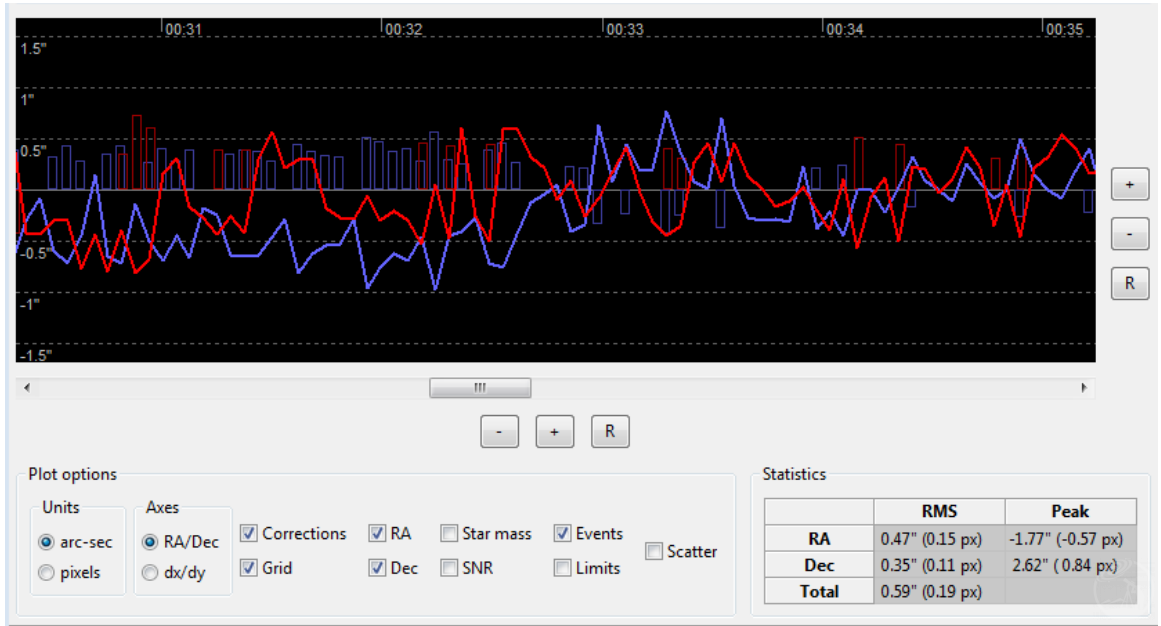
When PHDLogViewer loads a guiding session, the “RMS” value is the standard deviation of all
the star movements in that session In this example, about 68% of the movements were below
0.59 a-s, the remainder were larger. Just as a rough starting point, you probably want to see your
total RMS value be 1 a-s or lower. How much lower will depend on many things, especially your
seeing conditions and the quality of your mount. Now look at the individual RMS values for RA
and Dec to see how they compare. With most mounts I’ve seen, it’s common for the RA value to
be somewhat higher than the Dec value, probably because the RA gear system is always running
while the Dec gear system is not. There are also some seeing-related things that can tend to
make the RA displacements a bit larger and more frequent. However, if the RA and Dec RMS
values differ by a large amount, for example 2-3X, you are likely to see elongated stars in your
images. So what happens if these two values are nearly equal but are also quite large? That’s
likely to lead to bloated stars in your images, and your resolution and sharpness will suffer. It’s
not enough for the stars to look round – you want them to be both small and round, where “small”
is determined by your optics rather than by guiding errors. You’ll sometimes see forum posts
from people who say “I get perfectly round stars even with 30 minute exposures.” Well, that’s
probably a good thing – but how large are those star images, and how do their sizes compare to
what they get with short exposures of 10-20 seconds?
当PHDLogViewer加载一个导星会话时,“RMS”值是该会话中所有星体运动的标准偏差。在这个例子中,大约68%(译者注:对正态分布数据来说,68.27%的数据会集中在一个标准差内,95.45%的数据会落在两个标准差内,99.7%的数据落在三个标准差内,RMS指的是一个标准差内的数据精度)的运动低于0.59角秒,其余的则较大。 只是作为一个粗略的起点,你可能希望看到你的总RMS值是1角秒或更低。 低多少取决于很多方面,特别是你的观测条件和你使用的赤道仪品质。 现在来看看RA和Dec的独立RMS值如何比较。 在我见过的大多数赤道仪中,RA值通常比Dec值高一些,可能是因为RA齿轮系统一直在运行,而Dec齿轮系统没有。还有一些与视宁度有关的东西,往往会使RA的位移大一点,而且更频繁。然而,如果RA和Dec的RMS值相差很大,例如2-3倍,你很可能会在图像中看到拉长的星点。那么,如果这两个值几乎相等,但也相当大,会怎么样呢?这很可能会导致你的图像中出现臃肿的恒星,你的分辨率和锐度也会受到影响。仅仅让星点看起来是圆的是不够的--你希望它们既小又圆,其中“小”是由你的光学设备决定的,而不是由导星误差决定的。你有时会在论坛上看到有人说:"即使是30分钟的曝光,我也能得到完美的圆形星点"。这可能是件好事--但这些星点的图像有多大,它们的尺寸与他们10-20秒的短时曝光下得到的图像相比如何?
For many of us, guiding rarely runs all night without some sort of glitches. When looking at the
overall statistics, you often need to filter out these events. You’ll probably need to address them
at some point, but it’s good to get a feel for the overall guiding performance without having the
numbers polluted by these unusual events. Consider this section of a guide log:
对大多数人来说,导星系统在整夜运行时难免会遇到一些小问题。 当看总体统计数据时,你经常需要过滤掉这些事件。 你可能需要在某些时候解决这些问题,但是在不被这些不寻常的事件污染的情况下,对整体的导星性能有一个感觉是好的。考虑一下导星日志的这一部分。
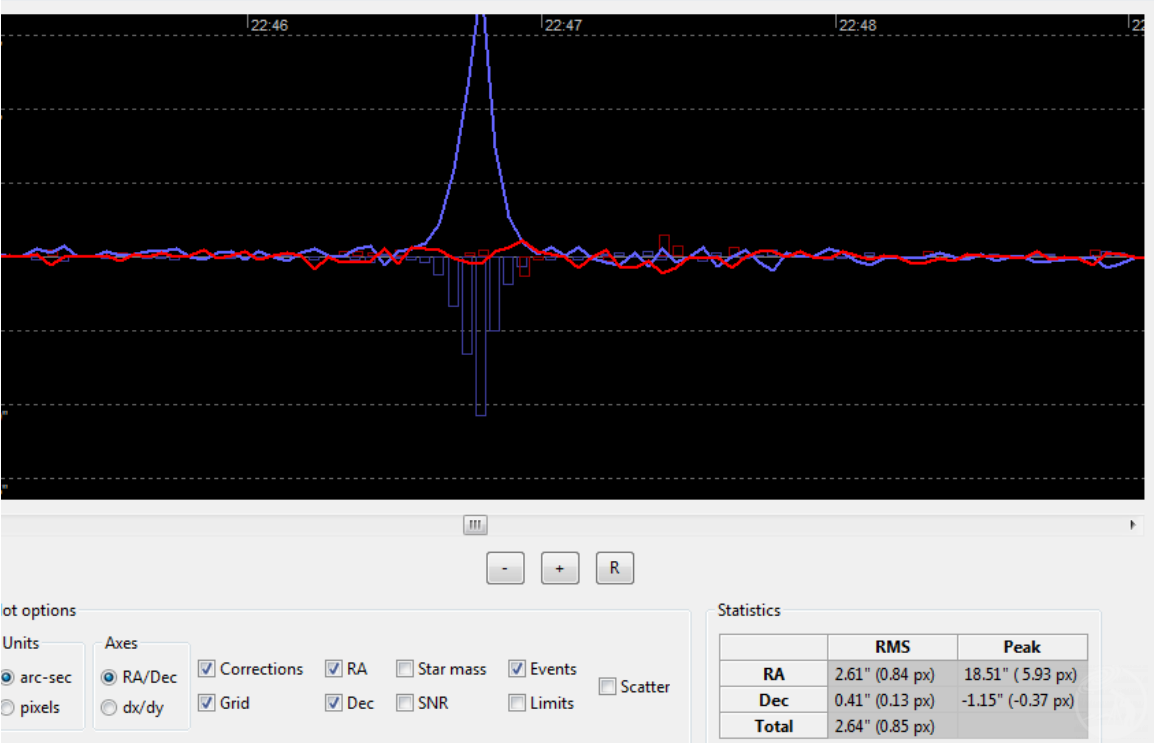
Something bad happened shortly before 22:47, a huge excursion in RA that caused the total RMS to reach 2.6 a-s for the time period shown. But the guiding before and after that event looks much better. You can use PHDLogViewer to isolate those regions to see how things were going. When I did that on this data, the statistics looked much better: a total RMS of 0.5 arc-sec before and after the unusual event. This tells you the overall guiding was going pretty well, but you'll need to figure out the source of this large RA excursion. Doing that will be discussed in the section on “Gremlins.”
在22:47前不久发生了一些问题,RA的巨大偏移导致在所示时间段内总的RMS达到2.6角秒。但是那个事件之前和之后的导星看起来要好得多。你可以使用PHDLogViewer来隔离这些区域,看看事情的发展情况。当我在这个数据上这样做时,统计数字看起来要好得多:在异常事件前后的总有效值为0.5角秒。 这告诉你整体的导星工作进行得很好,但是你需要弄清楚这个大的RA偏移的来源。这一点将在“Gremlins小妖精”一节中讨论。
Seeing 视宁度
When you look at a guiding graph, most of the rapid star motion you see is caused by seeing, something you can’t do anything about. If this isn’t a familiar subject for you, take a look at the section on “Astronomical Seeing and Guiding” in the Appendix. If the rapid movements are large, you should check the exposure time being used – longer exposure times can help to reduce the envelope of seeing deflections you see (see Appendix). These rapid excursions are reflected in the RMS statistics and may even be the primary contributor to them. It may help to run the Guiding Assistant periodically to get a sense of the typical seeing conditions at your site. Poor seeing can’t be corrected by guiding and you’ll simply have to do the best you can. Over time, you’ll probably learn what to expect on most nights and will quickly recognize the effects of seeing when you look at the guiding graphs. However, if you’re “chasing the seeing” because of poor choices in guiding parameters, you’ll see that too many of these seeing-induced star movements trigger guide commands, and this will often result in a saw-tooth pattern in the graph. Identifying those sorts of problems will be covered later.
你看到的导星图表中大部分快速星点运动(译者注:曲线变化)都是由视宁引起的,这是你无能为力的事情。如果你对什么是视宁不是很了解,可以看看附录中的“天文观测和导星”部分。如果快速移动浮动很大,你应该检查正在使用的曝光时间--较长的曝光时间可以帮助减少你看到的视线偏移的包络(见附录)。这些快速偏移反映在RMS统计中,甚至可能是主要的贡献者。定期运行“Guiding Assistant导星助手”可能会有帮助,以了解你所在地区的典型视宁状况。 糟糕的视宁是无法通过导星来纠正的,你只需尽力而为即可。 随着时间的推移,你可能会了解到在大多数晚上会出现什么情况,当你看到导星图表的时候,你会很快认识到视宁的影响。 然而,如果你因为导星参数选择不当而 "追着看",你会看到太多由看引起的星体运动会触发导星指令,这往往会导致导星图表中出现锯齿状图案。 识别这类问题的方法将在后面介绍。
What’s on the Graphs 图上有什么
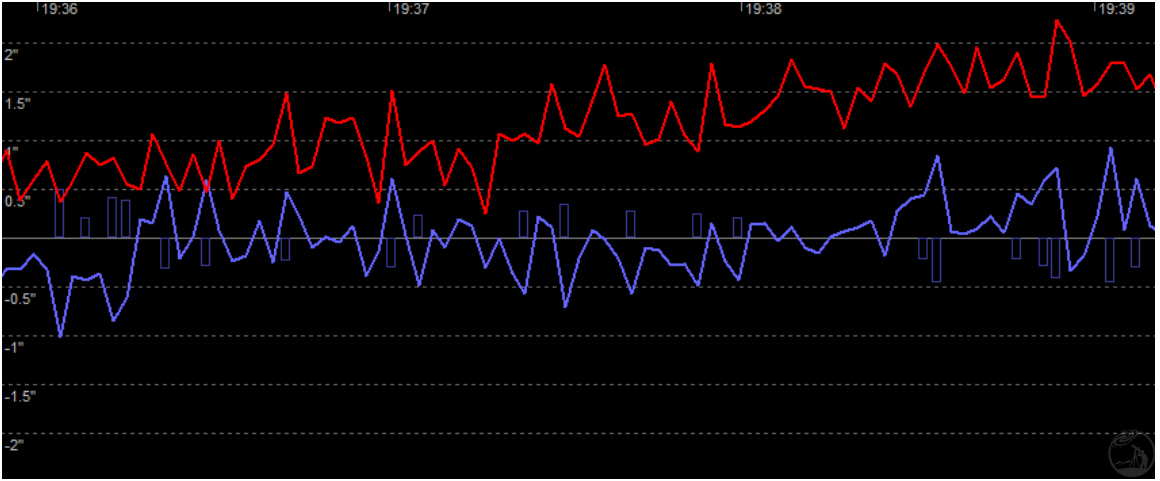
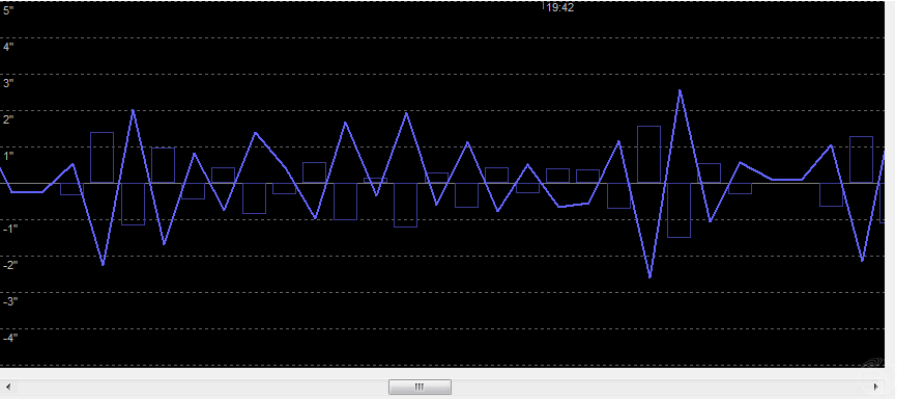
When you look at the details shown in the guiding graph, you’ll normally start by looking at two things: how far the guide star moved from one exposure to the next, and how PHD2 reacted to that move. Here’s a typical part of a guiding graph zoomed way in to show the details:
当你想从导星图表中获取细节信息,你通常会先看两点:导引星从一次曝光到下一次曝光移动了多远,以及PHD2对这种移动的反应。 下面是导星图表的一个典型部分,它被放大以显示细节。
The star movement is shown by the connected lines, blue for RA and red for Dec. The rectangles show the guide commands that were generated by PHD2, and their heights indicate the relative sizes of the guide pulses. Don’t over-analyze the up/down convention for displaying the rectangles. This orientation was chosen to reduce clutter and because it is more intuitive – you want the command to “push” the star in the direction opposite to its apparent movement. If you look closely, the rectangles always trail the star motion by a small amount because PHD2 is reacting to the move seen in the previous exposure. What you see here is pretty typical – sometimes it only takes one guide pulse to restore order while in other cases it may take multiple guide pulses in the same direction. You’ll see that some star displacements don’t trigger any guide pulses at all. That’s usually because of the “min-move” setting for that axis but it can also be due to intentional damping in the guide algorithms. You also need to pay attention to the scale at the far left to keep things in context. Beginners often look at these graphs and think the guiding is horrible because there seems to be so much motion. But the motion you see here is generally falling within a range of +/- 1 arc-sec, and the total RMS error for this section is about 0.6 arc-sec. In this example, the guiding was about as good as the seeing conditions would allow.
星体运动由连接线显示,蓝色代表RA,红色代表Dec。矩形显示了由PHD2生成的导星指令,其高度表示导星脉冲的相对大小。矩形的上/下方向直观显示了导星指令的推动方向--与星体表面运动相反。如果你仔细观察,这些矩形在时间轴上总是在略微滞后于星体运动,因为PHD2是对前一次曝光中的运动做出反应。你在这里看到的是非常典型的情况--有时只需要一个导星脉冲来恢复秩序,而在其他情况下,可能需要在同一方向上的多个导星脉冲。你会看到有些星点的位移根本就没有触发任何导星脉冲。这通常是由于该轴的 "最小移动 "设置,但也可能是由于导星算法中有意设置的阻尼。你还需要注意最左边的刻度标识,以保持图表能显示完整内容。初学者看这些图时经常因为导星曲线看起来上下波动幅度太大而感到恐慌,但实际上这里的星点运动幅度一般都是在+/-1角秒的范围内,这一部分的总RMS误差约为0.6角秒。在这个例子中,导星的效果与视觉条件所允许的一样好。
Easy Problems 简单的问题
To get warmed up, we can start by looking at some easy problems to diagnose. One of the easiest is something that looks like this:
为了热身,我们可以先看看一些容易诊断的问题。最简单的方法之一如下所示:

Wow! Absolutely perfect tracking, the guide star never moved! Um… no. This is what happens when you’re guiding on a hot pixel, which is the same as not guiding at all. This should almost never happen, but if it does you can try the following:
哇!绝对完美的追踪,导引星从未移动过!嗯…不。这种情况实际上是你把热像素当作了导引星,这与根本不导星是一样的。这几乎不应该发生,但如果发生了,你可以尝试以下方法:
- Let PHD2 auto-select the guide star (Alt-s). It can be hard to visually distinguish a hot pixel from a faint guide star when you're just peering at the display.
- Be sure you’re using either a dark library or a bad-pixel map.
- Apply a 2x2 or even 3x3 noise reduction filter (brain dialog/camera tab).
1、让PHD2自动选择导引星(Alt-s)。当你只是盯着显示器看的时候,很难从视觉上区分热像素和黯淡的导引星。
2、确保使用暗场库或坏像素映射图。
3、应用2x2甚至3x3降噪滤波器(brain dialog/camera选项卡)。
Now let’s look at another problem, one that’s more likely to happen if you’re using a guide cable attached to your camera and the mount's ST-4 guiding interface:
现在,让我们看看另一个问题,特别是当你使用ST-4线缆连接相机和赤道仪ST-4接口进行导星时(译者注:我理解这里作者想说的是相对于USB导星),则更可能发生此问题:
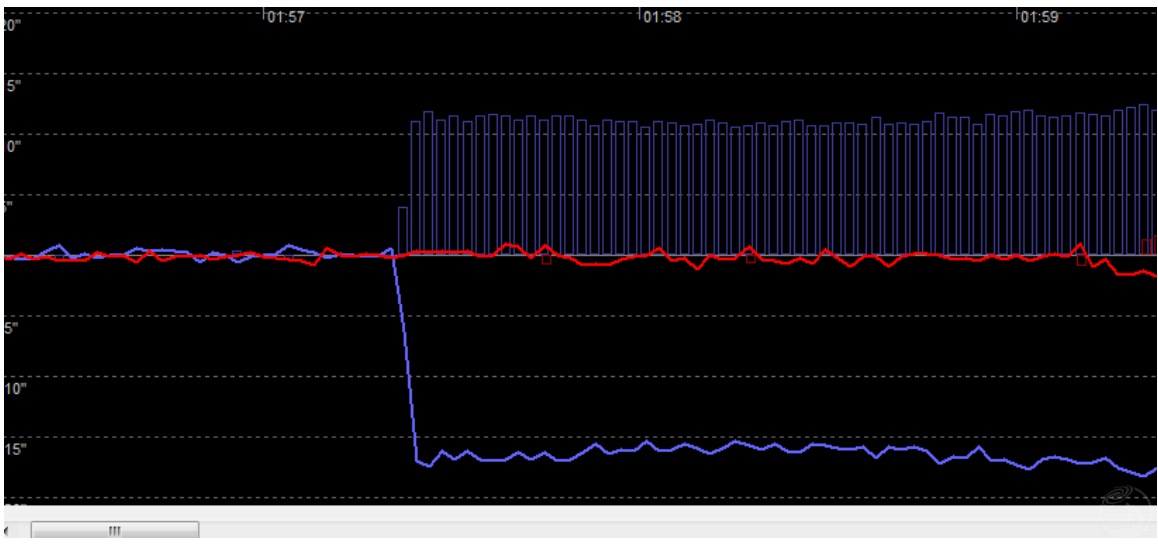
It looks like guiding got off to a reasonable start until the star took a big lurch to the west (down). But in this case, PHD2 was never able to recover. Look at the continuous stream of ‘east’ guide commands that were sent for the next two minutes – nothing happened! The guide star was never returned to its starting position and in fact continued to drift further west as time went on. The diagnosis? The guide cable was bad and the east guide commands were never being received by the mount. Replacing the guide cable solved the problem. This wasn’t the only possible explanation, but it was the obvious thing to try because the ST-4 guide cable is a common point of failure.
看起来导星一开始是正常的,直到星点突然向西(向下)倾斜。但在这种情况下,PHD2永远无法恢复。看看接下来两分钟内连续发送的“向东”导星指令流—什么都没发生!导引星从未回到它的起始位置,事实上,随着时间的推移,它继续向西漂移。诊断结果:ST-4线缆损坏,赤道仪从未接收到“向东”指令。更换ST4线缆后问题解决。这不是唯一可能的原因,但这是显而易见的尝试,因为ST-4导缆是常见的故障点。
Here’s another easy one, albeit one you might never see:
这是另一个简单的例子,尽管你可能从未遇到过:
Again, the session started out normally and the guiding results were looking pretty good for RA (blue). But the guide star was drifting to the north (Dec, red) and wasn't being restored – so is this another bad cable? No. Notice there are no red rectangles shown, which means PHD2 was never generating any guide commands to restore the star position. Why did this happen? Because the user had chosen a Dec guide mode of “north-only”, which told PHD2 not to generate any south guide commands. Changing the guide mode to ‘auto’ or ‘south’ solved the problem. In fairness, this wasn’t a dumb mistake because the user might have had a good reason to guide in only one Dec direction and didn’t know yet which direction that needed to be. Even so, it’s an instructive example, and we’ve seen numerous situations where users have blundered around in the brain dialog and inadvertently set the Dec Guide Mode to a weird value.
再一次,会话一开始是正常的,RA轴(蓝色)导星结果看起来很好。但是导引星漂移到了北方(DEC,红色),并且没有恢复—这又是电缆故障吗?并不是。请注意,没有显示红色矩形,这意味着PHD2从未生成任何导星指令来恢复星点位置。为什么会这样?因为用户选择了一个Dec向导模式“仅北向”,这告诉PHD2不要生成任何南向向导命令。将向导模式更改为“自动”或“向南”解决了问题。公平地说,这不是一个愚蠢的错误,因为用户可能有一个很好的理由只在一个Dec方向上引导,但还不知道需要哪个方向。即便如此,这也是一个有启发性的例子,我们已经看到了很多这样的情况,用户在brain对话框中犯了错误,无意中将Dec导星模式设置为一个奇怪的值。
We can finish the warm-up session with another example, one you probably will see at some point:
我们可以用另一个例子来结束热身,这个例子你可能会偶尔遇到:
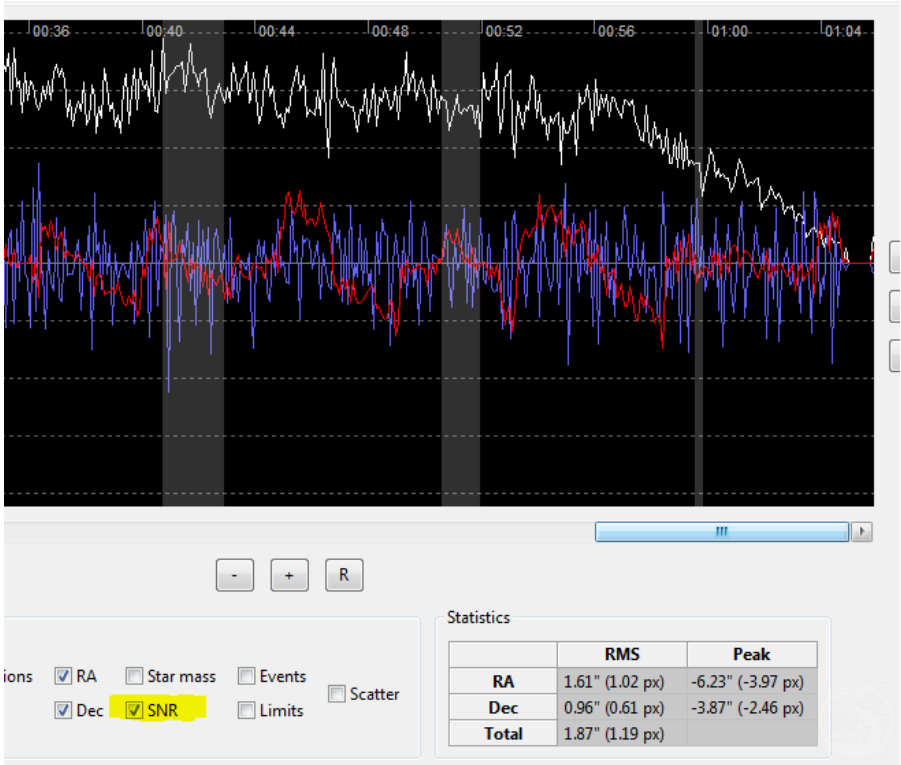
In this case, we’ve checked the SNR box near the bottom of the window to see how the star’s signal-to-noise ratio was behaving. That’s shown by the white line at the top of the graph. In this case, the SNR started dropping at around 0:56 and got steadily worse – probably because of clouds. This will often lead to deteriorating guiding results as well, so it’s always good to check this if you’re starting to investigate a problem.
在这种情况下,我们已经检查了窗口底部附近的SNR框,以查看导引星的信噪比表现如何。图表顶部的白线显示了这一点。在这种情况下,信噪比在0:56左右开始下降,并不断恶化—可能是因为有云。这通常也会导致导星结果的恶化,所以排查问题的时候首先检查一下信噪比情况是个好习惯。
The point of these easy examples is just to help you get used to looking at the graphs and asking the basic questions – how was the guide star moving on the sensor, what guide commands were generated as a result, and how did the mount respond to those commands? Of course, you may not see such easy problems, but the questions and basic methodology can be applied to more complicated situations.
这些简单示例的目的只是为了帮你养成查看导星图表的习惯并提出基本问题—导引星如何在传感器上移动,结果产生了哪些导星指令,以及赤道仪如何响应这些指令?当然,你可能看不到如此简单的问题,但是这些问题和基本方法可以应用于更复杂的情况。
Sudden Large Excursions – “Gremlins” 突然的大幅偏移--(造成设备故障的)小精灵
At some time or another, most imagers will be confronted with sudden large movements of the guide star – the earlier graph shows one such example. The first thing that beginners often ask is a chicken-and-egg question – is this something that just happened or was it caused by some sort of rogue guide command from PHD2? In every case I’ve seen, the answer is the former, and you’ll need to track down the source of this “gremlin.” Answering the chicken-and-egg question is easy though, you don’t need to take my assurances about it. Just enlarge the PHD2 guiding graph and look in the immediate region of the big move – did it start with a ridiculously large guide command or are there simply a bunch of guide commands that follow it as PHD2 tries to wrestle the mount back into position? Let’s look again at the earlier example, but this time we’ll zoom in and look closely at what happened when the RA guiding “went crazy”:
大多数拍摄者都会偶尔遇到导引星突然大幅度移动的情况—前面的图表显示了一个这样的例子。初学者经常问的第一件事是一个先有鸡还是先有蛋的问题—这是刚刚发生的事情还是由PHD2的某种失常导星指令引起的?在我看到的每一个案例中,答案都是前者,你需要追踪这个“小精灵”的来源。回答先有鸡还是先有蛋的问题很容易,你不需要接受我的保证。只需放大PHD2导星图表,看看导星大幅偏移的附近区域——它开始时有一个非常强的导星指令,还是在PHD2试图把赤道仪拉回原位时有一堆简单的导星指令跟随它?让我们再看一下前面的例子,但这次我们将放大并仔细观察当RA轴导星“发疯”时发生了什么:

We see that guiding was going normally on the left-hand side of the graph before the big upward spike. In particular, there was no huge guide pulse that caused the star to move so far on the sensor. Instead, you see PHD2 reacting *after* the guide star moved off-target by sending a stream of 9-10 RA guide pulses in the opposite direction. So “something just happened” to cause this problem – some sort of mechanical event that started the whole thing, not something caused by PHD2. Unfortunately, this is a very common problem, particularly for set-ups that aren’t permanently installed in an observatory. Worse still, the guide log doesn’t give you much help in figuring out what caused the original deflection, and the possibilities are seemingly endless. One thing that can help is to get a mental calibration of how little motion is required to trigger these events, particularly if you’re using a longer focal length set-up. Position your monitor so you can see it from near the telescope, then start looping on a star. Now gently push on various parts of the guide scope assembly and tug gently on the various cables. You’ll usually see a little goes a long way, and it’s very easy to create large guide star excursions.
我们看到,在大幅上升之前,在图表的左手边,导星是正常的。特别是没有巨大的导星脉冲导致星点在传感器上移动这么远。相反,你可以看到PHD2在导引星偏离目标后向相反方向发送了9-10个RA导星脉冲流。所以“刚刚发生的某种情况”导致了这个问题--是某种机械事件导致了这个问题,而不是由PHD2引起的。不幸的是,这是一个非常常见的问题,特别是对于那些不是永久性安装在天文台的装置。更糟糕的是,导星日志并没有提供太多帮助让人搞清楚是什么导致了最初的偏离,并且似乎有无穷多的可能性会造成这种偏离。有一种方法可以帮助你理解触发这些事件只需要多小的动作,特别是在你使用更长焦距的装置时:把你的显示器放在你能从望远镜附近看到的位置,然后开始环绕一颗星星。现在轻轻推动导星镜组件的不同部分,并轻轻拉动不同的电缆。你会看到微小的动作会造成很大的图像位移,它很容易造成大的导星偏移。
Here are some of the more common causes of these problems:
以下是导致这些问题的一些更常见的原因:
- Any sort of looseness in the mount, tripod, pier, or scope assemblies
- Dragging cables
- Wind gusts
- Anything that jostles the scope, camera, pier, or tripod such as moving around near the scope
1、赤道仪、三脚架、立柱或望远镜组件是否有任何松动。
2、线缆被拖拽
3、阵风
4、任何挤撞望远镜、相机、立柱或三脚架的情况,例如在望远镜附近走动
Dragging cables are a particularly common problem, which is why experienced imagers do a careful job of routing and securing them. Especially in cold weather, these cables become stiff and unyielding, so if they touch or rub against a stationary surface you will probably see guiding problems.
拖曳线缆是一个特别常见的问题,这就是为什么有经验的拍摄者会仔细布置和固定电缆。特别是在寒冷的天气,电缆会变得僵硬和不易弯曲,所以如果它们接触或摩擦静止的表面,就可能出现导星问题。
Obviously, the list of possibilities is endless. Some of the reported causes can be pretty funny assuming, of course, it’s someone else’s problem. Here are just a few real-world examples:
显然,可能性是无穷无尽的。一些被报道的原因可能非常可笑,当然,假设是其他人的问题。以下是几个真实的例子
- The family cat poking around in the observatory at 3:00 in the morning
- Owls landing on the end of the telescope tube
- Leaving a rolling observatory chair near the end of the declination axis (ok, that was me)
1、凌晨3:00在天文台闲逛的家猫
2、猫头鹰降落在望远镜筒的末端
3、在靠近DEC轴末端位置留下一把旋转的观测椅(好吧,那是我)
Harder Problems 更难的问题
Going beyond these fairly simple examples, you may encounter problems that are a bit more sophisticated. Often, you can make an initial judgment about whether you are under-correcting (falling behind) or over-correcting (creating oscillations or saw-tooth patterns). Those types of problems are covered next.
除了这些相当简单的例子之外,你可能会遇到一些稍微更复杂的问题。通常,你可以做出初步判断目前情况处于修正不足(落后)还是修正过度(产生振荡或锯齿模式)。接下来将讨论这些类型的问题。
Problems with Under-correction 修正不足问题
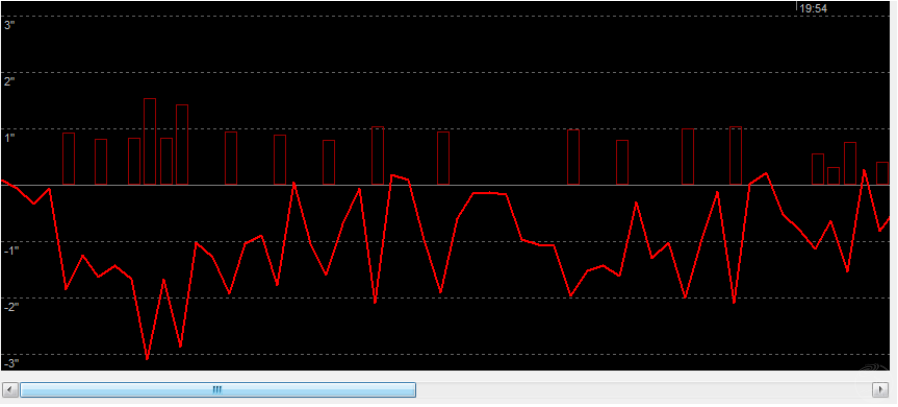
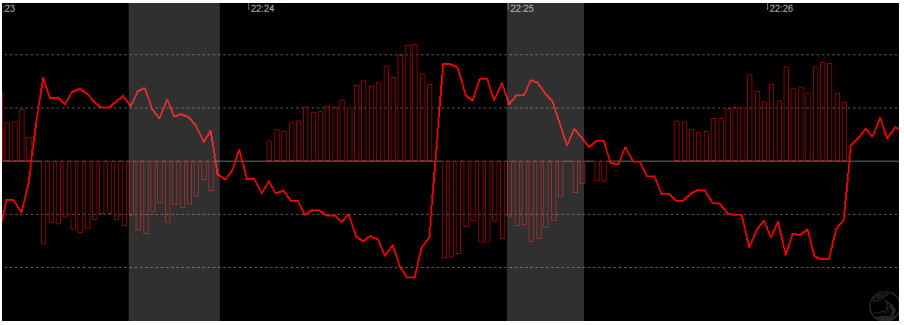
The most common form of under-correction is something you’re likely to see – declination backlash. Here’s a fairly typical example:
你可能看到的最常见的修正不足形式—赤纬(DEC)轴回差。这里有一个相当典型的例子:
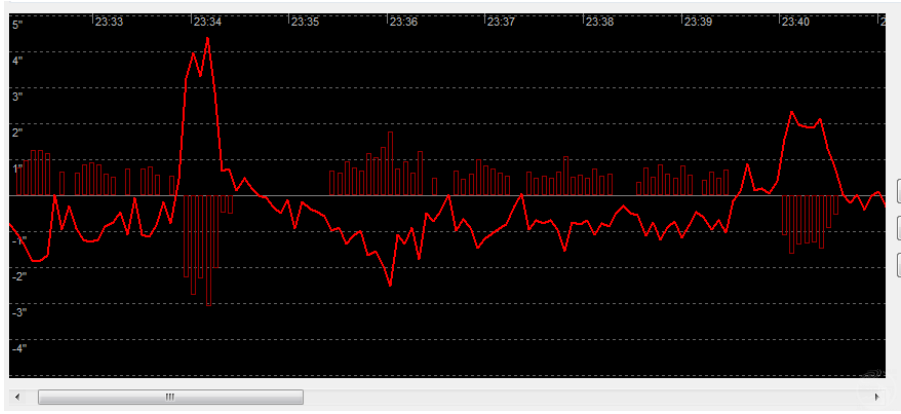
To emphasize the point, I’ve chosen to display only the Dec behavior. You can see that the mount becomes quite unresponsive whenever there’s a change in direction for the guide commands. When that happens, it takes a substantial amount of correction in the reverse direction to get the guide star moving back to the target point. This is a pretty standard symptom of backlash. Most geared mounts have this problem to some extent, and it’s caused by looseness in the gear mesh. Some amount of looseness is required in order to avoid binding of the gears, so it becomes a matter of how much is too much. The guide algorithms for declination do a pretty good job of minimizing direction reversals, and the PHD2 declination backlash compensation feature can help to control it if the inherent backlash is not too large. Improving the mount behavior is always a good first step assuming you have the means to adjust the gear mesh. If not, you may need to guide in only one direction for declination, as described in the PHD2 help document. Note that this problem almost never occurs in RA if you're using a guide speed of 1X sidereal or lower. That’s because the RA drive system won’t have to actually reverse direction. Instead it will just slow or pause for the length of the guide pulse and then continue rotating in the same direction.
为了强调这一点,我选择只显示DEC行为。可以看出每当导星指令的方向发生变化时,赤道仪就变得完全没有响应。当这种情况发生时,需要在相反的方向进行大量的校正,才能使导引星移回目标点。这是回差的一个非常标准的症状。大多数齿轮赤道仪在某种程度上都有这个问题,这是由齿轮啮合松动引起的。为了避免齿轮过紧转动不畅,需要有一定的松动量,所以这里有一个松动多少才合适的问题。DEC轴导星算法在尽量避免方向反转方面做得很好,如果固有齿隙不太大,PHD2 DEC回差补偿功能可以帮助控制它。假如你有能力调整齿轮啮合,这是一个能有效提升赤道仪表现的好办法。如果不会调整齿轮啮合,你可能只需要在一个方向上进行DEC轴导星,如PHD2帮助文档中所述。注意,如果你使用1X恒星速或更低的导星速度,这个问题在RA轴中几乎不会发生。这是因为RA驱动系统实际上不需要反转方向。取而代之的是,它将只是在引导脉冲的长度内减速或暂停,然后继续以相同的方向旋转。
Although you’re unlikely to see RA backlash, there’s another problem that looks somewhat similar:
虽然你不太可能看到RA的回差,但还有一个问题看起来有点类似:
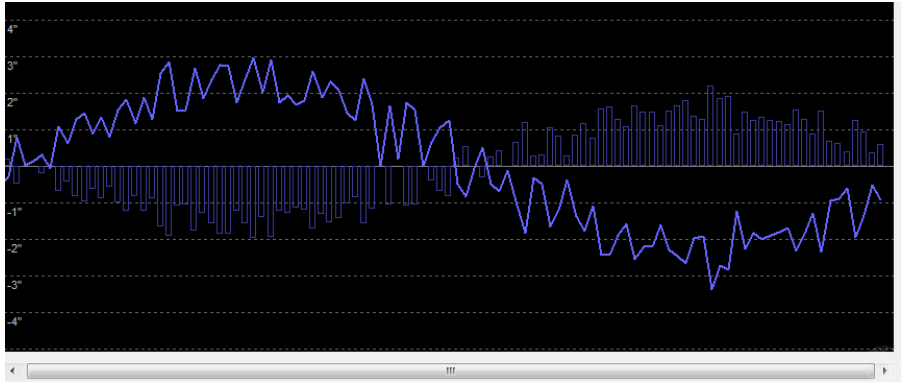
This time, we’re only looking at the RA data and we can see that PHD2 was not able to keep up with the guide star movements. But we know it’s not backlash for the reason just described. The clue is the sine-like appearance of the curve, which is very suggestive of RA periodic error. In this case, the periodic error in the mount was huge, and the combination of a long exposure time and conservative guiding parameters meant PHD2 was always “behind the curve.” This is why applying periodic error correction in the mount is always recommended, assuming the option is available. If that can’t be done, you’ll probably have to use shorter guide exposure times to avoid falling behind. A good way to confirm the diagnosis is to run the PHD2 Guiding Assistant and measure the behavior of the mount with guiding disabled. You’ll need to let it run for at least as long as the worm period in your mount – usually something in the 6-8 minute range or thereabouts.
这一次,我们只看RA数据,我们可以看到PHD2没有能够跟上导引星的运动。但是我们知道这不是回差,理由刚刚描述过。线索是曲线的正弦形外观,这很能说明RA的周期性误差。在这种情况下,赤道仪的周期性误差是巨大的,而长曝光时间和保守的导星参数的结合意味着PHD2总是“在曲线后面”。这就是为什么总是建议在赤道仪上应用周期性误差校正(PEC),如果有这个选项的话。如果不能进行PEC,你可能不得不使用较短的导星曝光时间来避免落后。确认诊断的一个好方法是运行PHD2导星助手并测量关闭导星时的赤道仪行为。你需要让它运行的时间至少与你赤道仪中的减速周期(译者注:原文worm period,不知道咋翻译了胡编的名字,大概意思就是减速轮在一个恒星日(86164.1秒)内旋转齿数次的单次时长,比如RST135有200齿,那么worm period就是86164.1/200=430.82秒)一样长—一般是在6-8分钟左右的范围。
A similar kind of problem can sometimes be seen in Declination, like this:
类似的问题有时可以在DEC轴导星曲线中看到,就像这样:
Here again, PHD2 was unable to keep the guide star near its target position. All of the guide pulses were in the same direction so we know it isn’t a backlash problem. Instead, this is a symptom of very large polar alignment error. The corrections needed to keep the guide star on target were large and needed to be applied frequently – and that wasn’t happening here. For Declination, there’s nothing wrong with guide corrections all in the same direction, that’s even a good thing. But if the corrections aren’t getting the job done, something else is wrong. To check the diagnosis of a large polar alignment error, use either the Guiding Assistant or the Drift Alignment tool in PHD2 to measure the error. Bad polar alignment, at least, should be a problem that’s easy to fix.
这里,PHD2再次无法将导引星保持在其目标位置附近。所有的导星脉冲都在同一个方向,所以我们知道这不是回差问题。相反,这迹象表明极轴误差非常大。保持导引星在目标上所需的修正量很大,而且需要频繁修正——而这里并没有发生。对于DEC轴来说,所有的导星校正都在同一个方向是没有问题的,这甚至是一件好事。但是,如果纠正没有完成工作,那就是别的地方出了问题。要确认对极轴误差过大的判断,可以用导星助手或PHD2中的漂移对极轴工具来测量误差。至少极轴误差大应该是一个容易解决的问题。
Other kinds of things can lead to guiding under-correction, but these are usually more complicated and require a good understanding of the guiding algorithms. As a general rule, you can consider decreasing a min-move setting or increasing an aggressiveness setting if you’re completely convinced the problem is not caused by an issue with the mount. You should also be sure you’re using a guiding algorithm that is appropriate for the axis. The Resist-Switch, LowPass, and LowPass2 algorithms apply a lot of damping and are best used for Declination. However, they can result in under-correction when applied to the RA axis. Conversely, the Hysteresis algorithm is usually well-suited for RA but can lead to too many direction reversals and oscillation when applied to Declination. These are generalizations, of course, but it’s best to stick with the default algorithm choices until you have a clear idea of what you’re doing.
其他情况也可能导致导星修正不足,但这些情况通常更复杂,需要对导星算法有很好的理解。一般来说,如果你完全确信这个问题不是由赤道仪问题引起的,你可以考虑减少最小移动设置(min-move setting)或者增加积极性设置(aggressiveness setting)。你还应该确保你使用的是适合该轴的导星算法。“抗拒转换”(译者注:导星策略尽量保持单向修正,避免方向反转)、“低通(译者注:避免高频修正)”和“低通2”算法应用大量阻尼,最适合用于DEC轴。然而,当应用于赤经RA轴时,它们会导致校正不足。相反,滞后算法(Hysteresis algorithm)通常非常适合于RA,但应用于DEC时会导致过多的方向反转和振荡。当然,这些都是针对通常情况而言,但是最好还是使用默认的算法选择,除非你清楚地知道你在做什么。
Problems with Over-correction 修正过度问题
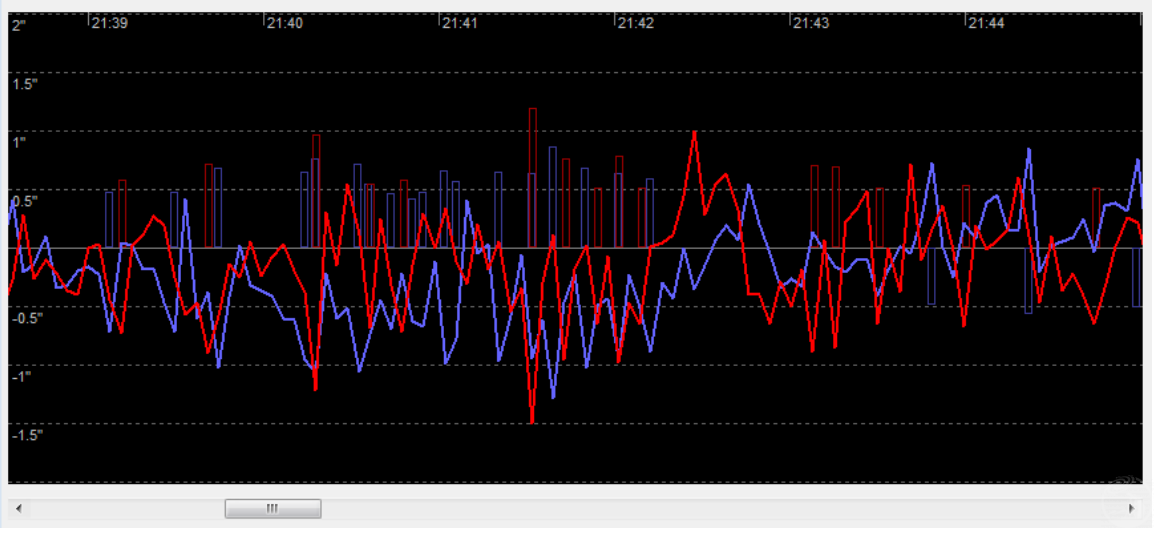
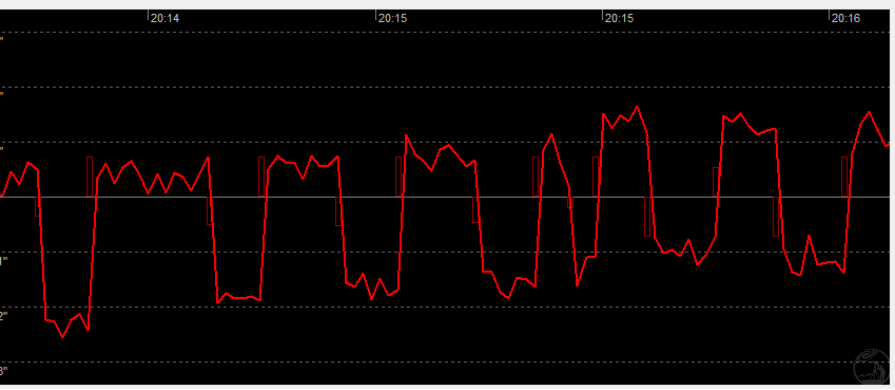
The most common source of apparent over-correction is “chasing the seeing.” Here’s an example:
最常见的修正过度的原因是“追逐视宁”,这里有一个例子:
In this case, we can see that RA corrections were being applied after every exposure, and they frequently reversed direction. The result was a saw-tooth pattern and no real stability in the RA guiding. A common cause for this in RA is using a min-move setting that is too small for that night’s seeing conditions or an exposure time that is too short (e.g. 1 sec). By trying to react to every guide star deflection, PHD2 was falling victim to the under-sampling problem described in the appendix. Increasing the min-move setting or perhaps the exposure time can help to improve this situation. You can also run the Guiding Assistant for a couple of minutes to get a measurement of that night’s seeing behavior and a suggestion for an appropriate min-move setting. If you think the min-move setting is correct, you can slowly reduce the RA aggressiveness setting or increase the RA hysteresis value. But you need to be careful about making these changes, being sure you’re taking enough time to evaluate what each change has done. This adjustment process will be described in a later section.
在这种情况下,我们可以看到每次曝光后都产生了RA校正,并且它们经常反转方向。结果是在RA导星中出现锯齿图案,RA轴并没有真正进行稳定的导星。RA出现这种情况的一个常见原因是使用的最小移动设置对于当晚的视宁条件来说太小,或者曝光时间太短(例如1秒)。PHD2试图对每次导引星偏移做出反应,因此成为附录中描述的欠采样问题的受害者。增加最小移动设置或曝光时间可能有助于改善这种情况。也可以运行导星助手几分钟,以测量当晚的视宁情况及获取适当的最小移动设置。如果你认为最小移动设置没有问题,那么可以慢慢降低RA积极性设置或增加RA滞后值(hysteresis value)。但是你需要小心做出这些改变,确保你有足够的时间来评估每个改变带来了什么。这个调整过程将在后面的章节中描述。
Over-correction can also occur in Declination, again driven by a min-move value that is too low:
在DEC中也可能出现修正过度,这也是由过低的最小移动值引起的:
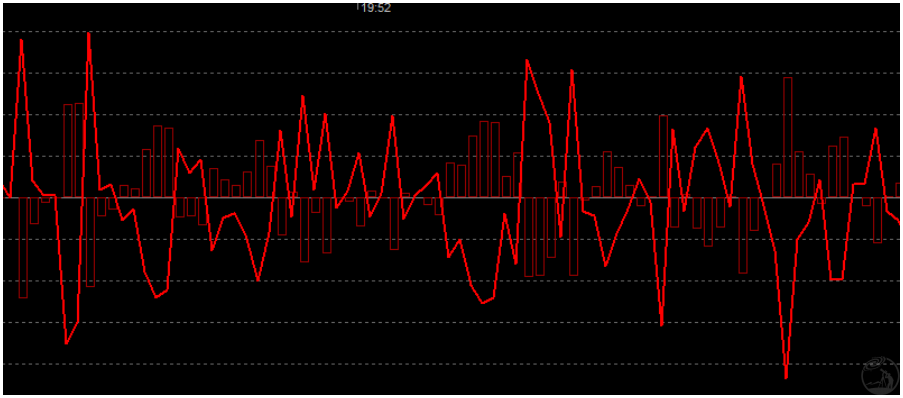
There are two likely sources for all this oscillation in Declination: seeing effects and a futile effort to correct for them. In this case, the user had specified a min-move of zero! Remember, the Dec motor will be turned off for much of the time, and you really only want to issue guide commands for slow-and-steady changes. Infrequent commands may be needed to correct for larger seeing excursions or small mechanical issues, but these are comparatively safe and not likely to create the sort of instability seen in this example. As mentioned earlier, you may also trigger over-correction in Declination if you're using a too-aggressive guiding algorithm such as Hysteresis.
有两个可能的原因导致了这种DEC振荡:视宁度影响和无效修正。在这种情况下,用户指定的最小移动量为零!记住,Dec轴电机大部分时间都是关闭的,导星指令仅应进行缓慢和平稳的修正。修正较大的视宁偏移或较小的机械问题可能需要不频繁的指令,但这些命令相对安全,不太可能产生这个例子中看到的那种不稳定性。如前所述,如果你使用过于激进的导星算法,比如“滞后Hysteresis”(译者注:导星的目的主要是为了消除赤道仪本身的机械误差或者解决平衡问题而不是抵消视宁引起的图像位移,因此可认为任意时刻赤道仪误差数值相对稳定,启用Hysteresis参数会将过去误差的历史数值与当前估算误差融合,使得导星指令更加平缓,避免导星算法对视宁(当然也可能是外界机械振动如被人踢脚架等)等突变反应过度,我感觉作者在这里想表达的意思应该是Hysteresis过低?),你也可能触发DEC的修正过度。
Another form of Dec oscillation can result from setting a declination backlash compensation in the mount. Here’s a result of that:
Dec振荡的另一种形式可能是由于在赤道仪中设置了DEC回差补偿。下图展示了这种情况:
Two things were happening here. First, whenever PHD2 issued a Dec guide pulse, there was a large over-shoot. Second, this caused the Dec guiding algorithm to pause for a bit, not wanting to drive the system into instability with increasingly large oscillations. Once the algorithm decided the star wasn’t going to bounce back on its own, it issued another guide pulse in the opposite direction and the cycle continued. This was all caused by having a backlash compensation parameter set in the mount. Once that was set to zero, the oscillation disappeared. The backlash compensation feature in PHD2 is different because it will automatically adjust to avoid these oscillations, and it seems to work pretty well for mounts with modest Declination backlash. Backlash settings in the mount almost never work when you're also guiding.
这里发生了两件事。首先,每当PHD2发出DEC导星脉冲时,都会出现大的“过冲Over shoot”。随后,过冲会导致DEC导星算法暂停一会,避免随着越来越大的振荡使系统变得不稳定。一旦算法确定星点偏移不会自己恢复,它就会发出另一个相反方向的导星脉冲,循环继续。这都是由于在赤道仪中设置了回差补偿参数造成的。一旦设定为零,振荡就消失了。PHD2中的回差补偿功能有所不同,因为它会自动调整以避免这些振荡,而且对于具有适度回差补偿的赤道仪来说,它似乎工作得很好。当你也在(用PHD2)导星时,赤道仪中的回差设置几乎不起作用。
Over-correction in declination can sometimes be triggered by one problem and then exacerbated by something different. Unfortunately, there’s no law to say you can have only one problem at a time.
DEC的修正过度有时会由一个问题引发,然后由不同的原因加剧。不幸的是,没有法律规定一次只能发生一个问题。
Consider this example:
考虑这个例子:
This starts out looking very much like declination backlash – whenever PHD2 reversed the direction of guiding, there was a delay before the mount responded and actually moved in the correct direction. And this is backlash, no question about it. But notice that when the mount did start moving in the right direction, it subsequently over-shot the target. This part of the behavior isn’t backlash but is likely a second problem. In the initial phases of the direction reversal, the Dec gears were changing direction and weren’t fully engaged for a period of time. That’s the backlash part of the problem, where the Dec drive train had effectively entered a dead zone. But once the gears did engage, the rotation of the Dec motor was still not able to overcome a resistive force in the drive train. This resistive force is often called “stiction”, a shorthand form of “static friction.” At this point in the guiding process, the Dec motor continued to turn in the right direction, but the energy wasn’t being translated into the desired rotation of the entire Dec axis. Instead, it was causing other sorts of deflection or flexure in the gear train that resulted in a temporary storage of this energy. Once the static friction was overcome, the stored energy in the other parts of the drive train was released, and the axis turned abruptly in a spring-back action. That was the likely source of the over-shoot in this example. Reducing the backlash as much as possible would be the first step to resolving this problem. Beyond that, you might need to look at things like Dec balance, lubrication, fasteners in the gear train, or anything else that can add to the static friction or mechanical elasticity on the Dec axis. Usually, this stuff is considered in the design and manufacture of the mount, so there may not be much you can do about it. If you can’t find a mechanical solution, you might need to use lower aggressiveness settings or even guide in
only one Dec direction.
这开始看起来很像DEC回差--每当PHD2反转导星方向时,在赤道仪做出响应并实际沿正确方向移动之前会有延迟。这是回差,毫无疑问。但是请注意,当赤道仪开始向正确的方向移动时,它随后会过冲目标。这部分行为不是回差,但可能是第二个问题。在方向反转的最初阶段,DEC齿轮正在改变方向,并且在一段时间内没有完全啮合。这部分属于回差问题,DEC的传动系统实际上已经进入了一个死区。但是一旦齿轮啮合,DEC电机的旋转仍然不能克服传动系统中的阻力。这种阻力通常被称为“静摩擦力stiction”,是“静摩擦力static friction”的简写形式。在导星过程的这一点上,DEC电机继续向正确的方向转动,但是能量没有被全部转换成DEC轴的所需要的旋转运动。相反,它在齿轮系中引起了其他类型的偏转或形变,导致了这种能量被暂时储存起来。一旦静摩擦被克服,存储在传动系统的其他部分的能量被释放,轴在回弹作用下突然转动。这可能是这个例子中过冲的原因。尽可能减少回差是解决这个问题的第一步。除此之外,还需要考虑DEC的平衡、润滑、齿轮系紧固、或其他任何可能增加DEC轴上静摩擦或机械弹性的因素。通常这些东西由赤道仪的设计和制造决定的,所以你可能对此无能为力。如果你没有机械方面的解决方案,你可能需要使用较低的积极性设置(aggressiveness settings),甚至只在一个DEC方向上导星。
Considerations for Adaptive Optics Devices 自适应光学器件的考虑因素
Generally speaking, amateur-grade adaptive optics (AO) devices can only deal with some of the problems that create imperfect guiding. AO’s can usually mask or at least improve the behavior of an under-performing mount because most of the guiding adjustments are accomplished by moving a small tip-tilt mirror – not 70 pounds of telescope gear. Basically, the mount is rarely asked to do anything beyond basic tracking. Problems with backlash, stiction, imperfect sidereal tracking, and mount controller software are largely eliminated with AO use. In addition, because an AO is inherently an off-axis-guider, it also eliminates differential flexure problems. These are significant benefits and explain why many serious imagers use AO’s.
一般来说,业余级别的自适应光学(AO)设备只能处理一些产生不完美导星的问题。AO通常可以掩盖或者至少是改善状态不佳的赤道仪的表现,因为大多数导星调整是通过移动一个小的倾斜镜来完成的——而不是70磅的望远镜装备。基本上,除了基本的追踪,赤道仪很少被要求做任何事情。使用AO基本上可以消除回差、静摩擦力、不完美的恒星跟踪和赤道仪控制器软件问题。此外,由于AO本质上是一个离轴导星器,它还消除了非同步形变问题。这些都是重要的好处,并解释了为什么许多严肃的拍摄者使用AO。
What an AO can’t eliminate is guide star movement due to seeing, at least not under normal conditions. Unless you can find an unsaturated guide star that produces a good SNR with exposures of 1/20 th or 1/50 th second or faster, you will still under-sample the seeing. For most AO users, these wonderful conditions basically never occur. Remember, you don’t get partial credit for under-sampling the seeing – the guide star position measurements and the resultant corrections will be inherently inaccurate, just as they are with normal guiding (see appendix). For that reason, AO users are still advised to use exposure times of longer than 1 second to avoid chasing the seeing. Somewhat ironically, many users of AO devices report getting the best results when they have very good seeing and/or an under-performing mount. In both of those cases, the performance of the underlying mount is the limiting factor in guiding, and an AO can substantially improve it.
AO不能消除的是因视宁引起的导引星运动,至少在正常情况下不能。除非你能找到一颗曝光时间为1/20秒或1/50秒或更快的能产生良好信噪比的不饱和导引星,否则你仍然会对视宁采样不足。对于大多数AO用户来说,这些奇妙的情况基本上不会出现。请记住,你不会因为视宁欠采样而获得偏信——导引星位置测量值和由此产生的修正值本质上是不准确的,就像正常导星一样(见附录)。因此,仍然建议AO用户使用超过1秒的曝光时间,以避免追逐视宁。有点讽刺的是,许多AO设备的用户报告说,当他们有非常好的视宁和/或表现不佳的赤道仪时,可以获得最好的结果。在这两种情况下,导星表现的限制因素都是底下的赤道仪性能,而AO可以显著改善这一点。
Analyzing logs from AO sessions is not very different from what’s been described before. Of course, you can tolerate a higher rate of guide commands and a bit more oscillation or over-shoot because there’s no real hardware penalty involved – no backlash or stiction, for example. But you still need to watch for over-correction due to seeing, and you should probably try using one of the history-based guiding algorithms such as hysteresis on both RA and Dec axes. By adjusting the aggressiveness and hysteresis settings, you should be able to get reasonable results.
分析来自AO会话的日志与之前描述的没有太大不同。当然,你可以容忍更高的导星指令速率和更多一点的振荡或过冲,因为不涉及真正的硬件影响——例如,没有回差或静摩擦力。但是仍然需要注意由于视宁造成的修正过度,并且可以尝试使用基于历史数据的导星算法,例如RA和Dec轴上的滞后算法。通过调整积极性和滞后设置,你应该能够获得合理的结果。
Making Guiding Parameter Changes – “Fooled by Randomness” 改变导星参数——“被随机性愚弄”
Trying to fine-tune guiding by making changes in the guiding parameters requires patience, something most of us have only in very limited amounts. The problem is what we’ve described before – much (or most) of the guide star movement is caused by seeing, a not-quite-random physical process we can do nothing about. Here’s a typical parameter-tuning process we’ve probably all engaged in:
试图通过改变导星参数来微调导星需要耐心,而我们大多数人都只有非常有限的耐心。问题是我们之前描述过的——很多(或大部分)导引星的运动是由视宁引起的,这是一个我们无能为力的不完全随机的物理过程。下面是我们可能都遇到过的典型参数调整过程:
- We notice the real-time guiding graph is looking pretty choppy. Not good.
- We make an educated guess that we need to lower the aggressiveness and maybe boost the hysteresis parameter.
- Guiding improves almost immediately – voila! Make a note of these settings, they’re golden.
- 5 minutes later we look at the graph again and now it looks worse – it looks like the guide commands are falling behind a bit.
- We put the guiding parameters back where they were originally.
- Guiding improves almost immediately – what the heck!!!
1、我们注意到实时导航图看起来很不稳定。不太好。
2、我们做了一个有根据的猜测,我们需要降低积极性设置,或许还需提高滞后参数
3、导星几乎立即得到改善——瞧!记下这些设置,它们是金子。
4、5分钟后,我们再次查看图表,现在情况看起来更糟——看起来导星指令有点滞后。
5、我们把导星参数改回原来的数值。
6、导星几乎立即得到改善——管它呢!!!
This is mostly just an exercise in chasing near-random behavior because the seeing conditions are changing. The only way to make any sense of these things is to look at much longer time intervals and to adjust parameters only in small increments. Even then, you are likely to see major differences in seeing on an hourly, nightly, and seasonal basis. In my experience, most people’s guiding problems have little to do with the PHD2 guiding parameters and a lot to do with all the other mechanical and physical things we’ve talked about. There’s nothing wrong with trying different guide settings, but it should be done with a clear understanding of what the parameters do and what specific behavior you’re trying to change. You really want to develop a hypothesis about what the problem is, then make an adjustment that will confirm or disprove your thinking. Wholesale changes, something we see all too often, are never a good idea. You also need to accept that some nights just have bad seeing and no amount of fiddling around is going to get you good guiding results. At that point, you’re probably better off going back in the house to watch a rerun of Gilligan’s Island.
这在很大程度上只是一个追逐近乎随机行为的练习,因为视宁条件在变化。想要理解这一点,唯一的方法是查看更长的时间间隔,并且只以很小的增量调整参数。这样你才可能看到视宁度在每小时、每晚和每季度的基础上的大致变化。根据我的经验,大多数人的导星问题与PHD2导星参数没有太大关系,而与我们谈到的所有其它机械和物理问题有很大关系。尝试不同的导星设置没问题,但应该清楚地理解参数的作用以及试图改变的具体行为。你应该对问题原因提出假设,在此基础上进行针对性调整来验证你的猜想是否成立。批量改变参数从来都不是一个好主意。你还需要接受一个事实,有些夜晚就是视宁不好,再怎么折腾也无法获得理想的导星效果。在这种时候,你还不如回房间去看《吉利根岛》重播。
Differential Flexure – “The Dog That Didn’t Bark” 非同步形变——“不叫的狗
If you’re like most people – having a life, for example – you’re probably not looking for reasons to analyze guide logs. Instead, you’ll probably get into them only because you see problems in your images, typically elongated stars. So a logical process for you to follow would be to note the time the problem image was taken and then look at the guiding performance in that specific time window. And you may find things like what we’ve discussed in this document or some variants of them – in other words, clear evidence that guiding problems caused the bad image. If you’re guiding through the main imaging scope, this will usually be the case. But if you’re using a separate guide scope assembly, your careful log analysis may reveal …… nothing. The guiding might be very good or at least completely consistent over a long period of time, yet you are seeing elongated stars in your deep-sky image. This is usually a sign of differential flexure, and it is not a welcome discovery.
如果你像大多数人一样--比如有自己的生活--你可能不会去寻找分析导星记录的理由。相反,你可能只是因为在你的图像中看到了问题,特别是拉长的星点,才会陷入其中。因此,你应该遵循的逻辑流程是记录问题图像的拍摄时间,然后查看特定时间窗口内的导星性能。你可能会发现类似我们在本文中讨论的东西或它们的一些变体——换句话说,有明确的证据表明,导星问题导致了拍摄图像效果不佳。如果你通过主镜进行导星(译者注:一般指OAG方式),这将是通常的情况。但是如果你使用的是单独的导星镜,你仔细的日志分析可能会发现……什么也没有。导星可能非常好,或者至少在很长一段时间内完全一致,然而你在你的深空图像却中看到被拉长的星点。这通常是非同步形变的标志,这不是一个好的现象。
We can cover the mechanical basics in short order. Any sort of telescope is going to flex and sag a bit as it moves around to different parts of the sky – that’s just gravity and physics. And the whole scope doesn’t behave as a single unit, that would be too easy. All the individual components - the focusers, the extension tubes, the cameras, the mirror - are going to flex and sag by slightly different amounts depending on their mass and where they are located. If you’re using a large telescope, especially an SCT, the amount of flexure can be substantial, keeping in mind that your camera is typically measuring things with an accuracy of 3-9 microns (a human hair is upwards of 15 microns in width). Now think about what happens with a separately attached guide scope and camera. Obviously, the same physics apply, but the amount and location of flexure will be different from that of the main scope. That is what is meant by the term ‘differential flexure.’ So if you’re guiding through one scope and imaging through the other, the guiding system is not going to see or correct for exactly the same motion that shows up on your main image.
我们可以很快地掌握机械基础知识。任何类型的望远镜在指向天空的不同位置时都会有一点变形和下垂——这只是重力和物理现象。并且整个望远镜的形变情况并不像一个单一的整体,否则那就太容易了。所有的单个组件——调焦器、延长筒、相机、镜子——都会变形和下垂,形变和下垂的程度略有不同,这取决于它们的质量和位置。如果你使用的是大型望远镜,尤其是SCT(译者注:施密特-卡塞格林结构望远镜),形变量可能会很大,你的相机通常测量精度(译者注:目前主流天文相机像素大小在2-9微米左右,形变幅度超过这个大小会发生像素级位移)为3-9微米(一根头发的宽度超过15微米)。现在考虑一下单独连接的导星镜和导星相机会发生什么。显然,适用同样的物理原理,但是形变的幅度和位置将与主镜的不同。这就是术语“非同步形变”的含义。因此,如果你通过导星镜进行导星的同时利用主镜进行拍摄,导星系统将不会完全同步的捕捉或修正主相机图像上看到的运动。
If you’re shooting at long focal lengths, say 2000mm or above, you’ll be lucky if you can take long exposures using a separate guide scope. It can happen, some people do it, but most cannot. And the successful minority are often just lucky or benefit from mysteriously offsetting errors. This is why most imagers use off-axis guiders for long focal length setups. That way, whatever flexure is present in the main scope will be visible to the guiding system, and corrections will be made. This is often a bitter pill to swallow because off-axis guiding brings its own complications and expense, but there’s often no good alternative. Many imagers go into denial about this and say “I’ve got everything clamped down really tight, nothing is moving, it can’t be differential flexure.” Yes, it can be. Every single mechanical interface on the system - clamped, threaded, geared, set-screwed, whatever - has some possibility for movement. And all you need is a movement of a few microns to create a problem. The flexure may not even be in the guiding system itself, it could be part of your main system. There’s no easy way to know which optical system is causing the problem, only that the two assemblies are flexing by different amounts at different rates.
如果你用长焦(比如说2000毫米或以上)拍摄时使用独立导星镜还可以进行长曝光,那你就很幸运了。这并非不可能,有些人做到了,但大多数人做不到。而成功的少数人往往只是运气好,或者受益于神秘的抵消错误。这就是为什么大多数成像仪在长焦距设置中使用离轴导星器(译者注:即OAG)的原因。这样,无论主镜中出现什么样的形变,导星系统都会看到,并进行校正。这通常是无奈之举,因为OAG导星方式会增加系统的复杂性和成本,但也没有什么更好的替代方案。许多拍摄者会否认这一点,并声称“我已经把所有东西都夹得很紧了,没有东西在动,这不可能是非同步形变。”但是这仍然会发生非同步形变。系统上的每一个机械接口——夹紧的、螺纹的、齿轮的、固定螺丝的等等——都有运动的可能性。你所需要的只是几微米的移动就能产生问题。形变甚至可能不在导星系统本身,它可能是你的主系统的一部分。没有简单的方法知道哪个光学系统导致了问题,只能知道两个组件发生了不同程度的形变。
If you suspect you’re seeing the results of differential flexure, you can do a simple experiment to confirm it. Just take a sequence of short exposures with guiding on, as you normally would. Choose an exposure time such that the stars in each raw frame are at least acceptable. Now stack those images without first aligning them. The stacked result is likely to show very elongated stars, and the size of the elongation tells you how much differential flexure you have. Sometimes, the star centers will shift by roughly equal amounts from one frame to the next, something you can see by quickly “blinking” through the raw frames. It’s worth doing this test because elongated stars can be caused by other things. Optical problems like poor collimation, tube currents, or other sorts of thermals near the scope can also result in elongated stars. These will more often show up on short exposures, so it’s good to confirm the differential flexure diagnosis before tearing into all the mechanical connections.
如果你怀疑你看到的是非同步形变的结果,你可以做一个简单的实验来证实它。就像平常一样,在导星下进行一系列短时间曝光。选择一个曝光时间,使每个原始帧中的星点至少是可接受的。现在堆叠这些图像,不要先对齐它们。堆叠的结果可能会显示非常拉长的星点,而拉长的大小会告诉你有多少非同步形变。有时,恒星中心会从一帧到下一帧移动大致相等的量,这可以通过快速“眨眼Blinking(译者注:PixInsight中有一个快速预览对比原始帧的进程)”原始帧来看到。做这个测试是值得的,因为拉长的恒星可能是由其他东西引起的。光学问题比如光轴不正,tube currents(译者注:不知道怎么翻译,镜筒气流?大概理解就是镜筒气流导致的波前变形,在牛反等开放式镜筒或者低海拔空气密度高的地区会更明显,充分的被动热平衡能够改善这种影响,具体可参考https://www.telescope-optics.net/turbulence_error.htm),或其他种类的镜筒附近的热气流也可能导致星点被拉长。这些会更经常出现在短曝光中,因此在断开所有机械连接之前,最好能确认非同步形变问题。
To conclude this topic, if you use a separate guide scope assembly, there will be some amount of differential flexure, period. If you’re fortunate, it might not show up with the exposure times you want to use. This is even quite likely if you’re imaging at relatively short focal lengths (e.g. below 1500mm). Or you may be able to tighten and adjust things so the differential flexure is essentially invisible in your images. But it is still there, lurking in the background – it’s just gravity and physics conspiring against you.
总结本主题,如果你使用单独导星镜,会产生一定量的非同步形变。如果足够幸运的话,你当前的曝光时长可能不会受它的影响。如果你在相对较短的焦距下成像(例如1500毫米以下),这是很有可能的。或者你可以收紧和调整组件使非同步形变基本上不影响你的成像。但它仍然在那里,潜伏在背景中——这是重力和物理对你的阴谋。
Appendix 附录
Image Scale and Measurements in Arc-Secs 以角秒为单位的图像比例和测量
The real-world things that affect guiding – bad seeing, mechanical displacements, flexure, etc. – create guide star movements that are best measured in units of arc-secs. That’s why PHD2 wants to know your camera pixel size and focal length – it can then convert the pixel-sized movements it sees on the guider images into units of arc-secs. That’s what we call “image scale” – how linear measurements on the camera sensor translate into angular measurements. Just to be clear, 1 arc-second is only 1/3600 of a degree - the angular size of a 0.004mm object held at arms-length. Discussions of guiding performance using units of pixels are completely meaningless, yet you will often see forum discussions that do that. Why is it useless? Let’s take a simple example, one that periodically shows up on the PHD forums. Let’s suppose you’ve been working with a separate guide scope having a 300mm focal length and a guide camera with 5u pixels. You’ve been working with this configuration for a while and observe that most of the star motion in the real-time guiding graph falls within a range of 0.3 px. That seems like a pretty good number, so maybe you even brag a little on the Yahoo forums. But now you switch to using an off-axis guider set-up, and the focal length of the guide scope is 2000mm, not 300mm. Suddenly, the real-time graph is showing star movement all over the place, huge swings of 2 pixels rather than 0.3. It’s the same mount, what the heck? Must be the stupid guiding software. Well, not really – you aren’t taking into account the image scale. With the guide scope, the image scale was 3.4 arc-sec/px – so the 0.3 px movements were really 1.02 arc-sec movements (3.4 x 0.3). But what about the new off-axis guider set-up? The image scale for that is 0.52 arc-sec/px, and the “horrible” 2 px movements are really just displacements of 1.04 arc-sec – essentially the same as before. You can use the calibration step calculator in the brain dialog (guide tab) to do the math for you and compute your image scale. But bottom line – always think of performance in terms of arc-secs. Of course, that’s why the graphs we use with PHD2 always default to displaying things in arc-secs.
现实世界中影响导星的因素——视宁不佳、机械位移、变形等。——创建导引星运动曲线最好是以角秒为单位。这就是为什么PHD2想知道你的相机像素大小和焦距——然后它就可以将它在导星图像上看到的像素大小的移动转换为角秒单位。这就是我们所说的“图像比例”——相机传感器上的线性测量如何转化为角度测量。需要明确的是,1角秒仅仅是1/3600度——一个0.004毫米的物体在手臂长度上的角度大小。使用像素单位来讨论导星性能完全没有意义,然而你会经常在论坛上看到有人这样做。为什么没用?让我们举一个简单的例子,这个例子会周期性地出现在PHD论坛上。假设你一直在使用一台焦距300毫米的独立导星镜和一台5微米像素大小的导星相机。你已经使用套设备有一段时间了,并观察到实时导星图表中的大多数星点运动都在0.3像素的范围内。这似乎是一个相当不错的数字,所以也许你甚至可以在雅虎论坛上吹嘘一下。但是现在你改用OAG导星,主镜焦距是2000毫米,而不是300毫米。突然,实时图表显示星点到处移动,巨大的摆动是2个像素而不是0.3个像素。这是同一个赤道仪,怎么回事?一定是那个愚蠢的导星软件。嗯,不尽然——你没有考虑到图像的比例。使用导星镜时,图像比例为3.4角秒/像素,因此0.3像素的移动实际上是1.02角秒的移动(3.4 x 0.3)。但是新的OAG导星装置怎么样呢?图像比例为0.52角秒/像素,而“可怕的”2像素移动实际上只是1.04角秒的位移——本质上和以前一样。你可以使用brain对话框(向导选项卡)中的校准步骤计算器来计算图像比例。但是,底线是——永远以角秒为单位考虑性能。当然,这就是为什么我们在PHD2中使用的图形总是默认以角秒显示。
Astronomical Seeing and Guiding 天文视宁度与导星
You can’t get very far looking at guiding performance without coming to grips with astronomical seeing. This is a complex subject, not something to try to deal with here. But the Cliff’s Notes version goes something like this. “Seeing” is the term given to the positional jitter and sudden brightness changes of stars we see (or image) through a telescope. It is atmospheric turbulence, caused by the movement of thermal cells in the Earth’s atmosphere, and there’s basically nothing to be done about it. Light is refracted as it passes through each atmospheric cell, so when you look at a star, you’re really looking through a column of air that is behaving like a column of little lenses. That might be ok except that the refraction of the light by each cell depends on the temperature of that cell, and the cells generally have different temperatures. And of course, the atmosphere is very dynamic, so these elements are all moving around at various speeds, coming into and then leaving the column of air you’re looking through. Thinking of it this way, it’s a wonder we can image anything. Particularly with longer focal lengths, this atmospheric seeing is the single biggest source of the guide star movement we see, and we’re stuck with it. Can’t we guide it out? The short answer is ‘no.’ The longer answer is also ‘no.’ The movement of the atmospheric cells means the guide star position is changing at rates of 10’s to 100’s of times per second. You aren’t going to be able to measure it and react to it nearly fast enough, even using amateur-grade adaptive optics devices. Professional observatories are able to do it to a large extent by employing very expensive measurement devices, artificial stars, and mechanisms that can both deform the mirror and shift the image at very high frequencies. That’s not us.
如果不了解天文观测,你就无法深入了解导星性能。这是一个复杂的问题,不是在这里就能解决的。但是克里夫的笔记(Cliff’s Notes)版本是这样的。“视宁”是我们通过望远镜看到(或拍摄)的星点的位置抖动和亮度突然变化的术语。这是大气湍流,由地球大气中的热细胞运动引起的,对此我们没什么可做的。光在穿过每个大气细胞时会发生折射,所以当你看一颗恒星时,你实际上是在透过一个空气柱看,这个空气柱的行为就像一个小透镜柱。这可能没问题,除了每个细胞对光的折射取决于该细胞的温度,并且细胞通常具有不同的温度。当然,大气层是非常动态的,所以这些元素都以不同的速度运动,进入然后离开空气柱后进入你的视线。这样想的话,我们能对任何东西成像简直是一个奇迹。特别是在焦距较长的情况下,这种大气视宁波动是我们所看到的导引星运动的最大来源,我们会被它困住。不能通过导星消除影响吗?简短的回答是“不”。更长的回答也是“不”。大气细胞的运动意味着导引星的位置以每秒10到100次的速度变化。即使使用业余级别的自适应光学设备,你也无法测量它并以足够快的速度做出反应。专业天文台能够在很大程度上通过使用非常昂贵的测量设备、人造恒星和能够使镜子变形并以非常高的频率移动图像的机制来做到这一点。那不是业余爱好者能做到的。
From a guiding perspective, we are “under-sampling” the seeing behavior. By the time we’ve taken an exposure, downloaded the image, computed the location of the guide star, and then transmitted a guide command, the star position on the sensor has moved – probably 10’s or 100’s of times. Basically, we’re always dealing with outdated information about the guide star position, so the guide commands are inherently inaccurate – and that doesn’t even take into account whatever shortcomings the mount has in precisely executing the guide commands it receives. Essentially, the star movements we can correct for - drift, periodic error, atmospheric refraction, etc - are hiding in a sea of noise created by the seeing conditions. This is a profound limitation of conventional guiding and a major reason why elaborate guiding algorithms or process control models have trouble producing any significant improvements over simpler algorithms. It's also the reason why using a combination of very short exposures and very aggressive guiding parameters invariably results in poorer guiding results.
从导星的角度来看,我们实际上受视宁影响而进行了“欠采样”。当我们曝光、下载图像、计算导引星的位置,然后发送导星指令时,传感器上的星点位置已经移动了——可能移动了10或100次。基本上,我们总是在处理关于导引星位置的过时信息,所以导星指令本质上是不准确的——这甚至没有考虑赤道仪在精确执行它接收的导星指令方面的任何毛病。本质上,我们可以校正的星点运动——漂移、周期性误差、大气折射等——隐藏在由观测条件产生的噪声海洋中。这是传统导星的一个深刻的局限性,也是为什么复杂的导星算法或过程控制模型很难产生比简单算法更大的改进的主要原因。这也是为什么使用非常短的曝光和非常激进的导星参数的组合总是导致较差的导星结果的原因。
Seeing and Exposure Times 视宁度与曝光时间
The high-frequency, seeing-induced star motion seen by the guide camera is strongly affected by the length of your guide exposure. Look at the following plots of guide star motion as the exposure time is increased:
导星相机看到的高频率、视宁诱发的星点运动受到导星曝光时间的强烈影响。随着曝光时间的增加,观察下面的导引星运动图:
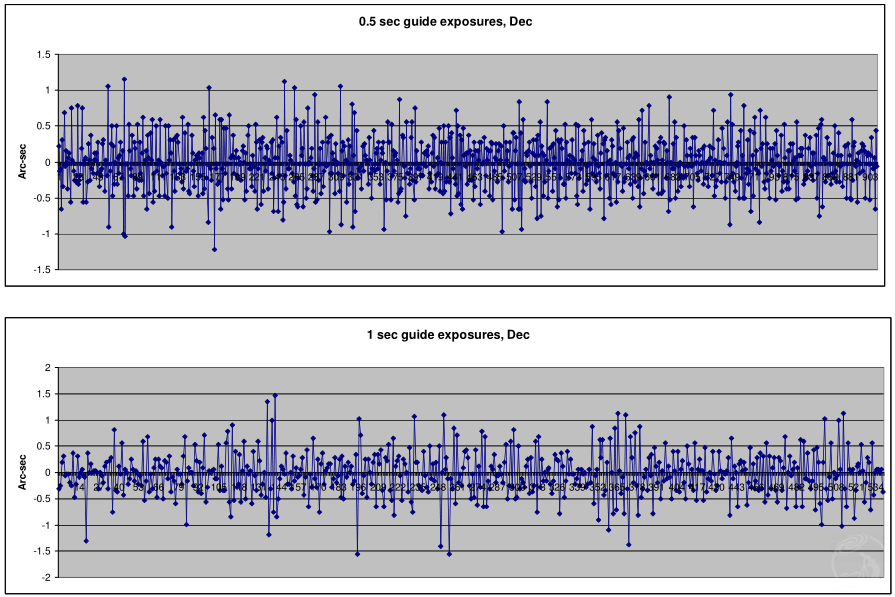
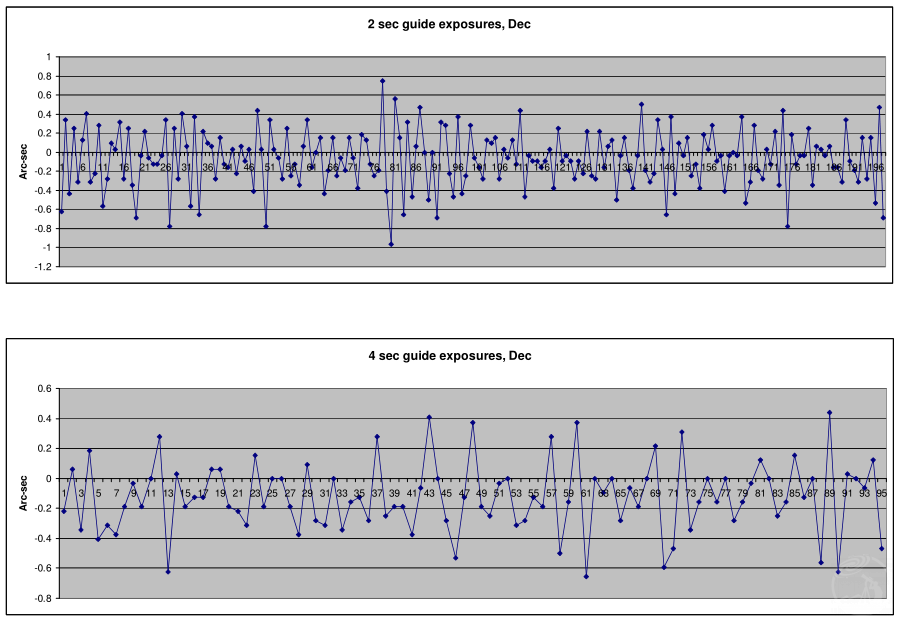
As the guide exposure is increased, the range of star motion decreases – the “envelope” of star motion goes down by a factor of 2X when switching from 1-sec exposures to 4-sec exposures. Essentially, the camera sensor is averaging the changing light pattern of the star and smoothing the result. These measurements are still inaccurate because of under-sampling, but the longer exposures make it easier for PHD2 to isolate and identify the lower frequency errors that really can be improved through guiding. Obviously, there is a practical upper limit to the exposure time. Typically, it will be limited by the length of time your mount can run on its own without needing a correction. Small errors from periodic error, drift, flexure and other sources need to be corrected before they become large enough to ruin an image. Finding the right balance will always depend on both the seeing conditions and the quality of the equipment. As a starting point in PHD2, we typically recommend using exposure times of 2-4 seconds.
随着导星曝光时长增加,星点的运动范围随之减小——当从1秒曝光切换到4秒曝光时,恒星运动的“包络”下降了2倍。本质上,相机传感器平均了恒星的不断变化的位置及亮度,令结果更加平滑。由于欠采样,这些测量仍然不准确,但较长的曝光时间使PHD2更容易隔离和识别低频误差,这些误差确实可以通过导星来改善。显然,曝光时间是有实际上限的。通常,它会受到赤道仪盲跟时长的限制。来自周期性误差、漂移、变形和其他来源的小误差需要在它们变得大到足以毁坏图像之前被校正。找到正确的平衡总是取决于视宁条件和设备的质量。作为PHD2的起点,我们通常建议使用2-4秒的曝光时间。
Conclusion 结论
Hopefully, this tutorial will help you get a better understanding of the guiding results you're getting and perhaps some clues for how to improve them. Even if you have trouble figuring out a problem, you can ask more informed questions on the support forum and be better able to evaluate the responses you get.
希望这篇教程能帮助你更好地理解你得到的导星结果,也许还有一些如何改进它们的线索。如果你在解决某个问题上有困难,可以在支持论坛上获取更多的信息,并且能够更好地评估你得到的回答。
If you have comments or suggestions for improving the tutorial, please post a message on the Open-PHD-Guiding forum or send me a message at bw_msg01@earthlink.net
如果你对改进本教程有任何意见或建议,请在Open-PHD-Guiding论坛上留言或给我发邮件到bw_msg01@earthlink.net
-- Bruce Waddington
V 1.0 December 2015
V 1.1 January 2016
-- 布鲁斯·沃丁顿
V 1.0 2015年12月
V 1.1 2016年1月
星友评论